O para sa mga garland, atbp.
Minsan ay nag-order ako ng KIT DIY kit mula sa AliExpress - LED running lights (). Naakit ako sa katawa-tawang presyo ng 63 rubles at ng pagkakataong magsanay ng paghihinang ng mga radioelement ng SMD.


Ang taga-disenyo na ito ay binubuo ng isang naka-print na circuit board na may sukat na 20x55mm at, nang naaayon, isang hanay ng mga kinakailangang bahagi ng radyo. Ang lokasyon ng pag-install ng lahat ng mga bahagi at ang kanilang mga rating ay ipinahiwatig sa board, kaya walang mga partikular na paghihirap sa pag-install.
Ang buong proseso ng pagmamanupaktura at pagpapatakbo ng circuit ay makikita sa video:
Listahan ng mga kasangkapan at materyales
-isang set ng mga running light sa isang CD4017 o K561IE8 chip ();
-distornilyador;
- gunting;
- panghinang na bakal;
-cambric;
- rechargeable na baterya mula sa isang cell phone;
-12V power supply;
- pagkonekta ng mga wire;
- foil PCB para sa naka-print na circuit board;
- K561TM2 microcircuits;
-mga risistor;
- transistors KT815 (o analogues);
-Mga LED.
Unang hakbang. Wiring out ang naka-print na circuit board mula sa AliExpress.
Ang kailangan lang ay ihinang ang mga bahagi ng kit sa board. Dahil sa maliit na laki ng mga radioelement ng SMD, gumamit ako ng "third hand" na may magnifying glass. Una, nagsolder ako ng mga resistor, capacitor at iba pang bahagi ng circuit maliban sa microcircuits. Sa dulo ay ihinang namin ang microcircuits at LEDs.
Ang circuit na ito ay nagpapatakbo mula 3 hanggang 15V. Ang pulse generator ay binuo sa NE555 chip, pagkatapos ay ang mga pulso ay pinapakain sa isang decimal counter na may isang decoder - isang CD4017 (K561IE8) chip, sa sampung mga output kung saan ang mga LED ay konektado sa pamamagitan ng kasalukuyang naglilimita sa mga resistor. Ang bilis ng paglipat ng mga tumatakbong ilaw ay kinokontrol ng isang trimming resistor.
Diagram ng disenyo.

Ang aking circuit ay gumana sa unang pagkakataon na binuksan ko ito.

Ikalawang hakbang. Modernisasyon ng running lights circuit.
Nang maglaon sa panahon ng mga eksperimento, nabigo ang CD4017 chip. Bilang isang mabilis na pag-aayos sa mga wire, kinailangan kong palitan ito ng domestic analogue na K561IE8.
Nais kong makakuha ng mas kawili-wiling mga epekto ng pag-iilaw ng mga tumatakbong ilaw. Bilang resulta, nag-assemble ako ng isa pang naka-print na circuit board na may mga K561TM2 trigger at KT815 power switch. Ang isang pulso mula sa bawat output ng K561IE8 ay ibinibigay sa input ng trigger gamit ang prinsipyo ng "latch", iyon ay, sa output ng trigger ang signal ay nananatiling pare-pareho hanggang sa dumating ang reset pulse mula sa binti 11 ng CD4017(K561IE8) chip. 9 na channel ang naka-on sa bawat cycle. Ang mga power switch batay sa KT815 transistors ay idinisenyo upang ikonekta ang mga load hanggang 1-1.5A. Kung kailangan mong ikonekta ang isang mas malakas na pag-load, pagkatapos ay kailangan mong palitan ang KT815 ng mas malakas na transistors. Dahil gumamit ako ng apat na K561TM2 microcircuits, nakakuha ako ng circuit na may walong channel. Sa circuit na ito, maaari kang makakuha ng 9 na channel ng LED control, ngunit pagkatapos ay kailangan mong magdagdag ng isa pang K561TM2 chip sa circuit sa pamamagitan ng pagkonekta ng isang trigger (ang K561TM2 chip ay binubuo ng dalawang trigger), at magdagdag din ng isang transistor switch.
Scheme pagkatapos ng pagbabago..


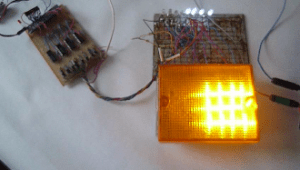
Upang suriin ang operasyon, ikinonekta ko ang mga piraso ng LED strip na may tatlong LED sa bawat isa sa walong channel.

Pinalitan ko ang 50 kOhm trimming resistor na may 470 kOhm isa upang palawakin ang mga limitasyon ng pagsasaayos ng dalas ng pulso. Natagpuan sa
Maraming mga mahilig sa kotse, upang mapabuti ang hitsura ng kanilang sasakyan, ibagay ang kanilang "Swallow" na may mga LED na ilaw. Ang isa sa mga pagpipilian sa pag-tune ay isang tumatakbong turn signal, na nakakakuha ng atensyon ng iba pang mga gumagamit ng kalsada. Nagbibigay ang artikulo ng mga tagubilin para sa pag-install at pag-configure ng mga turn signal gamit ang mga ilaw na tumatakbo.
[Itago]
Mga tagubilin sa pagpupulong
Ang mga LED lamp ay mga elemento ng semiconductor na kumikinang kapag nalantad sa electric current. Ang pangunahing elemento sa kanila ay silikon. Depende sa kung anong mga impurities ang ginagamit, nagbabago ang kulay ng mga bombilya.
Photo gallery "Mga posibleng opsyon para sa mga dynamic na indicator ng direksyon"
Mga tool at materyales
Upang makagawa ng isang tumatakbong turn signal gamit ang iyong sariling mga kamay, kakailanganin mo ang mga sumusunod na tool:
- panghinang na bakal;
- mga pamutol sa gilid o pliers;
- paghihinang bakal at paghihinang materyal;
- tester.
Kailangan mong maghanda ng fiberglass laminate mula sa mga consumable. Ito ay kinakailangan para sa paggawa ng isang naka-print na circuit board kung saan ilalagay ang elemento ng semiconductor. Ang mga kinakailangang LED ay pinili. Depende sa mga katangian ng mga LED at ang kasalukuyang at mga halaga ng boltahe ng on-board network, ang mga katangian ng mga proteksiyon na resistors ay kinakalkula. Gamit ang mga kalkulasyon, napili ang natitirang bahagi ng network (ang may-akda ng video ay si Evgeny Zadvornov).
Pagkakasunod-sunod ng trabaho
Bago gumawa ng mga turn signal, kailangan mong pumili ng angkop na scheme.
Pagkatapos, batay sa diagram, gumawa ng isang naka-print na circuit board at maglagay ng mga marka dito upang ilagay ang mga elemento sa hinaharap.
Ang pagpupulong ay binubuo ng isang pagkakasunud-sunod ng mga aksyon:
- Una, dapat mong patayin ang kapangyarihan sa kotse sa pamamagitan ng pagdiskonekta sa negatibong terminal mula sa baterya.
- Susunod, kailangan mong alisin ang mga lumang turn signal at maingat na i-disassemble ang mga ito.
- Ang mga lumang bombilya ay dapat na alisin ang takip.
- Ang mga joints ay dapat na malinis ng kola, degreased, hugasan at pahintulutang matuyo.
- Sa lugar ng bawat lumang elemento, isang bagong running light na turn signal ang naka-install.
- Susunod, ang pagpupulong at pag-install ng mga ilaw ay ginagawa sa reverse order.
- Pagkatapos ng pag-install, ang mga wire ay konektado.
Sa susunod na yugto, ang isang karagdagang nagpapatatag na pinagmumulan ng kuryente ay konektado sa network. Ang input nito ay tumatanggap ng kapangyarihan mula sa intermediate relay, at ang output ay konektado sa isang diode. Mas mainam na ilagay ito sa panel ng instrumento.
Kapag kumokonekta sa mga LED, dapat mong tiyakin na ang anode ay konektado sa plus ng pinagmumulan ng kapangyarihan, at ang katod sa minus. Kung ang koneksyon ay hindi ginawa nang tama, ang mga elemento ng semiconductor ay hindi sisindi at maaaring masunog pa.

Mga tampok ng pag-install at pagsasaayos ng mga tagapagpahiwatig ng direksyon ng pagtakbo
Maaari kang mag-install ng mga dynamic na turn signal sa halip na mga maginoo na LED. Upang gawin ito, ang board na may mga LED at kasalukuyang naglilimita sa mga resistor ay aalisin at lansagin. Sa repeater kailangan mong pilasin ang salamin mula sa katawan. Pagkatapos ay dapat mong maingat na putulin ang reflector at alisin ito.
Sa lugar ng remote reflector, naka-install ang isang SMD 5730 board, kung saan matatagpuan ang mga dilaw na LED. Dahil ang repeater ay may hubog na hugis, ang board ay kailangang i-delaminate at baluktot ng kaunti. Kailangan mong putulin ang bahagi na may connector mula sa lumang board at maghinang ito upang ikonekta ang controller. Pagkatapos ang lahat ng mga sangkap ay ibabalik sa kanilang lugar.
Upang ayusin ang tiyempo ng mga tumatakbong LED na ilaw, ang isang switch ay ibinebenta sa microcontroller. Kapag natagpuan ang isang angkop na bilis, ang mga jumper ay ibinebenta sa lugar ng switch. Kapag nagkokonekta ng dalawang pin sa lupa, ang pinakamababang oras sa pagitan ng mga LED flash ay magiging 20 ms. Kapag ang mga contact ay sarado, ang oras na ito ay magiging 30 ms.

isyu sa presyo
Maaari kang gumawa ng running light turn signal mula sa daytime running lights. Ang kanilang gastos ay 600 rubles. Sa kasong ito, maaari mong gamitin ang "pixel" RGB LEDs bilang light source sa halagang 7 piraso para sa bawat tumatakbong turn signal. Ang halaga ng isang elemento ay 19 rubles. Upang makontrol ang mga LED, kailangan mong bumili ng Arduino UNO na nagkakahalaga ng 250 rubles. Kaya, ang kabuuang gastos ay magiging 1060 rubles.
Sinabi ko ang "Gop" noong nakaraang taon - oras na para tumalon :)
O sa halip, gawin ang ipinangakong pagsusuri ng mga tumatakbong turn signal.
Nag-order ako ng 1 metro ng itim na WS2812B tape (144 LEDs) sa isang silicone tube, kapag nag-order ay pinili ko ang "Black 1m 144led IP67" (marahil may magugustuhan ang puting kulay ng substrate, mayroong isang pagpipilian).
Isang salita ng pag-iingat
Nakatanggap ako ng tape na soldered mula sa dalawang kalahating metrong piraso. Ang downside nito ay isang vulnerable na punto ng paghihinang (maaaring masira ang mga contact sa paglipas ng panahon) at isang mas mataas na agwat sa pagitan ng mga LED.
Bago bumili, suriin sa nagbebenta ang tungkol sa puntong ito. 
Ang mga contact wire ay ibinebenta sa tape sa magkabilang panig upang ikonekta ang ilang mga piraso sa serye, dahil Hindi ko ito kailangan, kaya inalis ko ang mga wire sa isang gilid, tinatakan ang lahat ng neutral sealant at binalot ng kaunti pang itim na electrical tape.


Naka-attach sa salamin gamit ang double-sided transparent adhesive tape, halimbawa.
Mga detalye ng pag-install
Inalis ko ang mga ibabaw, inilagay muna ang malagkit na tape sa tubo (tatawagin ko ito, kahit na ang cross-section ay hugis-parihaba), putulin ang nakausli na labis ng mas malawak na tape, itinulak ang mga gilid ng tubo sa mga bitak sa pagitan ang kisame at ang itaas na bahagi ng mga pandekorasyon na panel ng mga likurang haligi (ang mga contact wire na may connector ay nakatago sa likod ng isang panel ), nakasentro ito at nagsimulang pindutin ito laban sa salamin, dahan-dahang hinila ang proteksiyon na layer ng tape.
Sa kasamaang palad, walang video - walang libreng mga kamay para sa paggawa ng pelikula, at iba ang sasakyan ng lahat.
Kung may hindi malinaw, magtanong sa mga komento.
Ang pagsubok sa init ng tag-init ay matagumpay - walang lumabas o lumutang.
Ang negatibo lamang ay ang anggulo ng salamin ay banayad, ang mga LED ay kumikinang nang mas paitaas. Sa isang maaraw na araw mahirap makita, ngunit dahil ito ay mga dobleng signal, 
Ngayon ay lumipat tayo sa elektronikong pagpupuno.
Ginamit ko ito, ngunit natuklasan ito kamakailan lamang
Para sa halos parehong halaga nakakakuha kami ng mas maraming goodies
Ang sketch ay gagana nang walang anumang mga espesyal na pagbabago sa Wemos kapag nagprograma sa Arduino IDE, at kung magpapatupad ka ng isang maliit na web server, pagkatapos kapag nakakonekta dito sa pamamagitan ng Wi-Fi, maaari mong baguhin ang mga halaga ng naturang mga variable bilang ang oras ng pagkaantala sa pagitan ng mga blink, ang dami ng deceleration sa panahon ng emergency braking atbp.
Dito sa hinaharap, kung ang isang tao ay interesado sa pagpapatupad ng isang proyekto sa ESP8266, maaari akong mag-post ng isang halimbawa para sa pagbabago ng mga setting sa pamamagitan ng web interface, i-save ang mga ito sa EEPROM, at pagkatapos ay basahin ang mga ito.
Maaaring ilunsad ang web server, halimbawa, sa pamamagitan ng pag-on ng turn signal at pagpindot sa pedal ng preno kapag naka-on ang ignition (sa pamamaraan ng pag-setup, poll ang status ng mga kaukulang input).
Upang magpatupad ng flashing mode sa panahon ng mabigat na pagpepreno, binili ko
Sinusubaybayan ng sketch ang antas ng deceleration kapag pinindot ang pedal ng preno kung ito ay lumampas sa 0.5G (matalim na pagbabawas ng bilis, ngunit walang mga squealing preno), pagkatapos ay isang flashing mode ay naka-on sa loob ng ilang segundo upang makaakit ng karagdagang pansin.
Ang mga control signal sa mga input ng Arduino mula sa "plus" ng mga stop, turn signal at reverse ay ibinibigay sa pamamagitan ng galvanic isolation - mga optocoupler na may kasalukuyang-limiting resistors, na sa huli ay bumubuo ng LOW level sa Arduino inputs (patuloy na hinila sa positibo sa pamamagitan ng 10 kOhm resistors ).
Power supply - 5 volts sa pamamagitan ng DC-DC step-down converter.
Ang buong bagay ay nakatiklop sa isang sandwich at nakaimpake sa isang angkop na kahon, kung saan ang direksyon ng pag-install ay minarkahan ng isang arrow para sa tamang oryentasyon ng gravity sensor
Diagram at larawan

Ang nominal na halaga ng pull-up (sa positibong) resistors ay pamantayan - 10 kOhm, nililimitahan ang kasalukuyang ng optocoupler resistors - 1 kOhm. Inalis ko ang mga optocoupler mula sa mga lumang board, dalawa ang PC123, dalawa ang PC817. 
Sa unang larawan makikita mo ang dalawang karagdagang mga terminal; Dahil sa kotse ko, kapag naka-on ang steering column lever, may short to ground, ikinonekta ko ang mga wire sa lever block at ang Arduino inputs. Kung inilipat ng steering column lever ang plus o kinuha mo ang signal mula sa "+" ng kaliwa/kanan na turn signal lamp, pagkatapos ay ikonekta ang mga ito sa pamamagitan ng galvanic isolation. 

Well, ngayon ang sketch mismo (Arduino IDE)
#isama
Sinubukan kong magkomento dito hangga't maaari, ngunit kung may mga katanungan, susubukan kong magdagdag ng mga komento (kaya't inilalagay ko ito sa teksto ng pagsusuri, at hindi bilang isang nakalakip na file). Ito, sa pamamagitan ng paraan, ay nalalapat din sa iba pang mga punto ng pagsusuri - dadagdagan ko rin ito kung may mga makabuluhang katanungan sa mga komento.
At sa wakas, isang pagpapakita ng trabaho (para sa video na ginamit ko ang isang sketch na may demo mode).
Upd. Ginawa ko ang sketch gamit ang demo mode na partikular para magkasya ang lahat sa isang maikling video.
Ang ilaw ng preno ay kumikislap lamang sa panahon ng matigas na pagpepreno (ito ay tinalakay sa itaas sa panahon ng mabagal na pagpepreno at kapag nakatayo sa mga masikip na trapiko, ito ay umiilaw lamang, nang hindi nakakainis sa mga driver sa likod.
Ang liwanag sa gabi ay hindi labis, dahil... Dahil sa pagtabingi ng salamin, ang mga ilaw ay mas nakadirekta pataas kaysa pabalik.
Ang mga karaniwang ilaw ay gumagana gaya ng dati, ang strip na ito ay duplicate ang mga ito.
Balak kong bumili ng +97 Idagdag sa mga paborito Nagustuhan ko ang pagsusuri +89 +191
Ang taga-disenyo ng mga running light mula sa Aliexpress ay isang naka-print na circuit board at isang hanay ng mga bahagi ng radyo. Ang kailangan mo lang gawin ay maghinang ng mga bahagi sa board.
Ngunit maaari kang makakuha ng mas kawili-wiling mga epekto ng pagpapatakbo ng mga ilaw mula dito. Halimbawa, para sa mga turn signal ng sasakyan o brake lights, o para lang sa mga garland para sa isang holiday.

Maaaring gumana ang circuit na ito sa hanay ng boltahe ng supply na 3 -15 Volts. Ang pulse generator ay binuo sa NE555 chip, pagkatapos ay ang mga pulso ay ipinadala sa isang decimal counter na may isang decoder - isang CD4017 (o K561IE8) chip, sa mga output kung saan ang mga LED ay konektado sa pamamagitan ng kasalukuyang naglilimita sa mga resistor.
Ang bilis ng paglipat ng mga tumatakbong ilaw ay kinokontrol ng isang trimming resistor. Magdagdag ng circuit na may mga trigger at output transistor switch. Hindi na kailangang mag-program ng anuman, atbp. Bilang resulta, makakakuha ka ng mas kawili-wiling mga epekto sa pag-iilaw ng mga tumatakbong ilaw. Kailangan nating gumawa ng isa pang naka-print na circuit board na may K561TM2 trigger at KT815 power switch. Ang isang pulso mula sa bawat K561IE8 output ay ibinibigay sa trigger input gamit ang "latch" na prinsipyo, iyon ay, sa trigger output ang signal ay nananatiling pare-pareho hanggang sa ang reset pulse ay dumating mula sa pin 11 ng CD4017(K561IE8) chip. 9 na channel ang naka-on sa bawat cycle.