ในคู่มือนี้ เราจะดูทั้งสองเวอร์ชัน: ปกติและ Micro เราจะทราบวิธีกำหนดค่าและใช้เฟิร์มแวร์ MW-OSD รวมถึงวิธีเชื่อมต่อกับ Naze32 และตัวรับ
MinimOSD และ Micro MinimOSD คืออะไร
แม้ว่าการตั้งค่าจะซับซ้อนกว่า OSD อื่นๆ มาก เช่น Super Simple OSD หรือ E-OSD ที่คุณใส่เข้าไปและใช้งานได้ทันที แต่ MinimOSD ก็มีข้อดีหลายประการ และรูปลักษณ์ของหน้าจอก็สามารถปรับแต่งได้อย่างเต็มที่
ฟังก์ชั่นที่มีประโยชน์ที่สุด: การแสดงพิกัด GPS, สไตล์และแบบอักษรที่ปรับแต่งได้ โดยใช้เมนูบนหน้าจอคุณสามารถเปลี่ยนค่าสัมประสิทธิ์ตัวควบคุม PID อัตรา ฯลฯ ตัวอย่างสิ่งที่สามารถแสดงบนหน้าจอได้
การตั้งค่าสัมประสิทธิ์ PID ผ่านเมนู:

ขนาด น้ำหนัก pinout การบัดกรีเพื่อลดขนาด
MinimOSD เวอร์ชันเต็ม
OSD นี้มีมาหลายปีแล้ว ข้อดีของเวอร์ชันนี้ (MinimOSD พร้อม KV Mod) คือมีหน้าสัมผัสด้านข้างสำหรับเชื่อมต่อเซ็นเซอร์กระแส, RSSI, เซ็นเซอร์แรงดันไฟฟ้า ฯลฯ ก่อนหน้านี้ เราต้องบัดกรีสายไฟโดยตรงกับขาของชิปอย่างระมัดระวังด้วยตัวเราเอง ซึ่งเป็นเรื่องยากมาก เวอร์ชันนี้ทำให้ชีวิตง่ายขึ้นมาก ฉันซื้อบอร์ดดังกล่าวให้ตัวเองหนึ่งอัน (เวอร์ชัน 2)

ขนาดของ MinimOSD พร้อม KV Mod V2: กว้าง 21 มม. ยาว: 43 มม. น้ำหนัก: 5.5 ก. (รวมขั้วต่อ)
ไมโคร MinimOSD
ฉันประหลาดใจกับขนาดไมโครของ OSD นี้เมื่อมีคุณสมบัติครบถ้วนเหมือนกับเวอร์ชันเต็ม นอกจากความเป็นไปได้ในการจ่ายไฟจาก 12V ซึ่งแทบไม่เคยใช้ในเวอร์ชั่นเก่าเลยเนื่องจากบอร์ดร้อนเกินไป ดังนั้นจึงเป็นเรื่องสมเหตุสมผลมากที่จะลบฟังก์ชันนี้และลดขนาดลง

รุ่นไมโครมีน้ำหนักและขนาดประมาณ 1/3 ของขนาดเต็ม
ขั้วต่อการบัดกรี
การบัดกรีส่วนหัวให้เป็น MinimOSD ขนาดเต็มนั้นง่ายและสะดวก แต่สำหรับรุ่นไมโคร ฉันไม่ชอบวิธีที่ผู้คนมักจะบัดกรีมัน

ความคิดสร้างสรรค์ของฉัน: ฉันจำเป็นต้องใช้ตัวเชื่อมต่อที่ทำมุมแทนตัวเชื่อมต่อแบบตรง เพื่อที่ฉันจะได้มีพื้นที่ว่างเพิ่มเติมเมื่อติดตั้งภายในคอปเตอร์
ในตอนท้ายสุด เราบรรจุมันด้วยการหดด้วยความร้อนเพื่อป้องกันการบัดกรีและสายไฟ
เชื่อมต่อกับ Naze32, แบตเตอรี่, เครื่องรับ, กล้อง, เครื่องส่งวิดีโอ
การประกอบคอปเตอร์ของฉันนั้นง่ายมาก ในแผนภาพคือทุกสิ่งที่ควรเชื่อมต่อ: Naze32, LiPo, เครื่องรับ, กล้อง FPV และเครื่องส่งสัญญาณวิดีโอ

แผนภาพการเชื่อมต่อ MinimOSD ปกติกับ Naze32, กล้อง, เครื่องรับ, เครื่องส่งวิดีโอ, แบตเตอรี่
วิธีเชื่อมต่อเวอร์ชันไมโคร:

คำถามที่พบบ่อย 1. บางคนบ่นว่าข้อความหายไปเมื่อเพิ่มคันเร่ง วิธีแก้ไข: เชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ทั้งหมด - กล้อง, OSD, เครื่องส่งวิดีโอเข้ากับกราวด์ทั่วไป
คำถามที่ถูกถามบ่อย 2. OSD ไม่แสดง มีเพียงภาพจากกล้องเท่านั้น วิธีแก้ไข: ลองเปลี่ยนมาตรฐาน PAL/NTSC ในการตั้งค่า OSD
พิน VBAT1 เชื่อมต่อกับแบตเตอรี่ลิเธียมหลักเพื่อระบุแรงดันไฟฟ้า พิน RSSI เชื่อมต่อกับตัวรับสัญญาณควบคุมเพื่อแสดงความแรงของสัญญาณ (ในกรณีที่ตัวรับสัญญาณคือ FrSky D4R-II ในโหมด CPPM ดังนั้น Pin1 คือสัญญาณ PPM, PIN2 คือเอาต์พุต RSSI)
การเชื่อมต่อกับ Naze32 ผ่านพอร์ตอนุกรม (TX และ RX) จะทำให้ Naze32 ส่งข้อมูลการบินไปยังหน้าจอ (GPS, ทิศทางของเข็มทิศ ฯลฯ ) และ OSD จะสามารถเปลี่ยนค่าสัมประสิทธิ์ PID ของตัวควบคุมการบินโดยใช้รีโมทคอนโทรล .
ระวัง! การเชื่อมต่อกับคอมพิวเตอร์ใช้พอร์ตอนุกรมเดียวกัน ซึ่งหมายความว่าหากคุณต้องการใช้ตัวกำหนดค่า Baseflight หรือ Cleanflight คุณต้องปิดใช้งาน TX และ RX จาก OSD ก่อน
โดยไม่ต้องเชื่อมต่อกับพอร์ตอนุกรม MinimOSD จะทำงานอย่างอิสระในการแสดง RSSI และแรงดันไฟฟ้า
หากคุณใช้ Taranis ในโหมด PPM โปรดอ่านบทความนี้: วิธีรับ RSSI ในช่องแยก (โดยไม่ต้องใช้สายเพิ่มเติม) เป็นภาษาอังกฤษ
นี่คือสิ่งที่ดูเหมือนภายในมินิควอดของฉัน
กำหนดค่าโดยใช้ MW-OSD GUI
มีเฟิร์มแวร์ไม่กี่ตัวสำหรับ MinimOSD สิ่งที่ฉันชอบคือ Multiwii-OSD (mwosd) เวอร์ชันปัจจุบันคือ 1.3 ตัวกำหนดค่าเป็นโปรแกรมที่สะดวกมาก เมนู OSD มีความชัดเจน เฟิร์มแวร์เป็นเวอร์ชันล่าสุด และรองรับ Cleanflight และ Baseflight นอกจากนี้ยังช่วยให้คุณปรับค่าสัมประสิทธิ์ PID ได้โดยตรงผ่านเมนู OSD
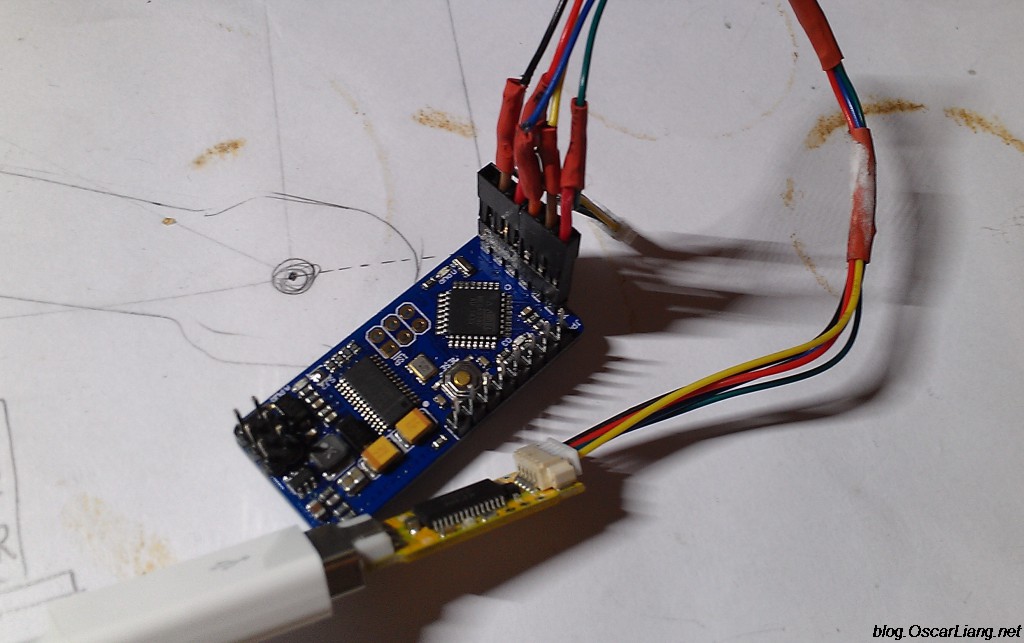
เชื่อมต่อ MinimOSD กับโปรแกรมเมอร์ FTDI
จำเป็นต้องมีอะแดปเตอร์ FTDI สำหรับทั้งการกำหนดค่าและเฟิร์มแวร์ การเชื่อมต่อทำผ่านสายไฟ 5 เส้น: DTR (GRN), TX, RX, 5V และ GND


การกำหนดค่า MinimOSD โดยใช้ MW-OSD GUI
คุณสามารถกำหนดค่าการแสดงข้อมูลเที่ยวบินใดๆ ผ่านทางอินเทอร์เฟซแบบกราฟิกได้ เพราะ ฉันขับมินิคอปเตอร์ ทั้งหมดที่ฉันต้องการคือแรงดันแบตเตอรี่ RSSI และตัวจับเวลา ฉันใช้แบตเตอรี่ลิเธียม 4S และคำเตือนการชาร์จต่ำตั้งไว้ที่ 13.6V (3.4V ต่อเซลล์ แม้ว่าฉันควรตั้งเกณฑ์ให้สูงกว่านี้ก็ตาม) สำหรับการกำหนดค่า 3S สามารถตั้งค่าแรงดันไฟฟ้าที่แสดงคำเตือนเป็น 11V ได้ ฉันใช้ FPV ในรูปแบบ PAL

สิ่งเดียวที่คุณต้องกังวลคือแรงดันแบตเตอรี่ ค่าเริ่มต้นยังห่างไกลจากอุดมคติ ดังนั้นคุณต้องลองตั้งค่าต่างๆ เพื่อให้ได้ค่าที่ถูกต้อง ฉันจะทำอย่างไร:
ค่าเริ่มต้นสำหรับ " ปรับแรงดันไฟฟ้า" = 200,และแรงดันไฟฟ้าที่แสดงโดย OSD คือ 21.0V ฉันเอามัลติมิเตอร์ วัดแรงดันไฟฟ้าของแบตเตอรี่ และได้ 11.1V (แทนที่จะใช้มัลติมิเตอร์ คุณสามารถใช้ไซเรนกับโวลต์มิเตอร์ได้ แบบนี้ ประมาณทรานส์)

ตอนนี้เรามาลดมูลค่ากันเถอะ” ปรับแรงดันไฟฟ้า“สูงถึง 110 ตอนนี้หน้าจอ OSD ของฉันแสดง 11.5V เพื่อหลีกเลี่ยงการเปลี่ยนพารามิเตอร์ไปมาอย่างต่อเนื่อง เราต้องคำนวณค่าที่แน่นอนโดยใช้คณิตศาสตร์และข้อมูลที่เรามีอยู่แล้ว 🙂 เราต้องคำนวณว่าพารามิเตอร์ "ปรับแรงดันไฟฟ้า" ให้ค่า 1 โวลต์เท่าใด
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
เรารู้ว่าค่าที่ถูกต้องบนหน้าจอควรเป็น 11.1V ดังนั้นค่า " ปรับแรงดันไฟฟ้า"ควรเป็น:
110 - (11.5-11.1)/0.1056 = 106.21 (106 ก็ได้)
ความหมาย " ปรับแรงดันไฟฟ้า" สามารถเปลี่ยนแปลงได้ไม่เพียงแต่ในตัวกำหนดค่าเท่านั้น แต่ยังเปลี่ยนผ่านเมนูบนหน้าจอด้วย ดังนั้นจึงไม่จำเป็นต้องเชื่อมต่อ MinimOSD เข้ากับคอมพิวเตอร์และใช้ตัวกำหนดค่า
Arduino เป็นโปรแกรมเมอร์สำหรับ MinimOSD หรือไม่?
ฉันพยายามใช้ Arduino UNO เป็นโปรแกรมเมอร์ FTDI เหมือนที่ฉันเคยทำกับอุปกรณ์อื่นมาก่อน ฉันสามารถเปลี่ยนพารามิเตอร์ OSD ผ่านโปรแกรม MW-OSD GUI ได้ อย่างไรก็ตาม ฉันพบปัญหาเมื่อกระพริบ MinimOSD ข้อความแสดงข้อผิดพลาดคือ:
avrdude: stk500_getsync(): ไม่ซิงค์กัน: resp=0x00.
ดูเหมือนว่าจะมีปัญหากับการซิงโครไนซ์ข้อมูล แต่ฉันแน่ใจว่าได้เชื่อมต่อ DTR อย่างถูกต้องเพื่อรีเซ็ตบนบอร์ด Arduino ฉันไม่รู้ว่าจะทำอะไรได้อีก ดังนั้นฉันจึงใช้โปรแกรมเมอร์ FTDI เพื่อแฟลช MinimOSD
เมนู OSD: กำหนดค่า PID, อัตรา, แรงดันไฟฟ้า, RSSI
เมนู OSD เป็นคุณสมบัติโปรดของฉัน และนี่คือสาเหตุที่ฉันละทิ้ง SuperSimple OSD เป็นหลัก มีพารามิเตอร์มากมายที่คุณสามารถเปลี่ยนได้โดยไม่ต้องเชื่อมต่อกับคอมพิวเตอร์ ตัวอย่างเช่น ฉันสามารถเปลี่ยนค่าสัมประสิทธิ์ PID ได้โดยตรงในฟิลด์โดยใช้รีโมทคอนโทรลโดยไม่ต้องใช้ Bluetooth หรือคอมพิวเตอร์! อย่างไรก็ตาม คุณไม่สามารถเปลี่ยนพารามิเตอร์อัตราการหมุนและอัตราพิทช์แยกกันใน Cleanflight ได้ ในขณะที่พารามิเตอร์เหล่านี้เชื่อมโยงกัน ในเวอร์ชันใหม่ พารามิเตอร์เหล่านี้จะแยกจากกัน
หากต้องการไปที่เมนู MW-OSD คุณต้องปลดอาวุธคอปเตอร์ก่อน จากนั้น:
- ก๊าซอยู่ตรงกลาง
- หันเห (หันเห) - ไปทางขวา
- ระดับเสียง - ไปข้างหน้า
เพื่อนำทางเมนู:
- Roll/pitch (pitch/roll) - เพื่อเลื่อนดูเมนู
- Yaw (yaw) - เพื่อเปลี่ยนค่า
- PID Config (Roll/Pitch/Yaw PID สำหรับโหมดการบินที่แตกต่างกัน)
- การปรับ RC (อัตรา RC, RC Expo, อัตรา Pitch/Roll, อัตรา Yaw, TPA (คันเร่ง PID Att)
- แรงดันไฟฟ้า (แสดงหรือไม่แสดงแรงดันไฟฟ้า, "ปรับแรงดันไฟฟ้า", "สัญญาณเตือนแรงดันไฟฟ้า", ค่า "เซลล์")
- RSSI (แสดงหรือไม่)
- ปัจจุบัน (แสดงปริมาณการใช้ปัจจุบันหรือไม่ กำหนดค่า)
- ขั้นสูง (หน่วย: เมตร/นิ้ว, สัญญาณ: Pal หรือ NTSC, เข็มทิศ)
- จอแสดงผล (สวิตช์, คันเร่ง, พิกัด GPS, เซ็นเซอร์, gimbal ฯลฯ)
- สถิติ (ระยะทาง ความสูงสูงสุด ความเร็วสูงสุด เวลาบิน)
กระพริบ
ผู้ขาย MinimOSD บางรายจะแฟลชเวอร์ชันล่าสุดด้วยตนเอง ดังนั้นคุณจึงไม่ต้องกังวลเรื่องการแฟลช แต่บางทีคุณอาจต้องการอัปเดตเฟิร์มแวร์ในภายหลังหรือลองใช้เวอร์ชันอื่น หากต้องการตรวจสอบเวอร์ชันเฟิร์มแวร์ ให้เปิด OSD บนคอปเตอร์แล้วดูข้อความบนหน้าจอบูต
สำหรับเฟิร์มแวร์แต่ละตัว คำแนะนำจะอธิบายรายละเอียดวิธีการแฟลช นี่คือบทสรุป:
- ดาวน์โหลดไฟล์เฟิร์มแวร์
- ดาวน์โหลด Arduino IDE
- เปิดไฟล์เฟิร์มแวร์ใน Arduino IDE
- เปลี่ยนการตั้งค่าหากจำเป็น
- ฉันไม่ได้เปลี่ยนแปลงอะไรมาก มีเพียงประเภทบอร์ด (WitespyV1.1) และเฟิร์มแวร์ตัวควบคุมการบิน (Cleanflight)
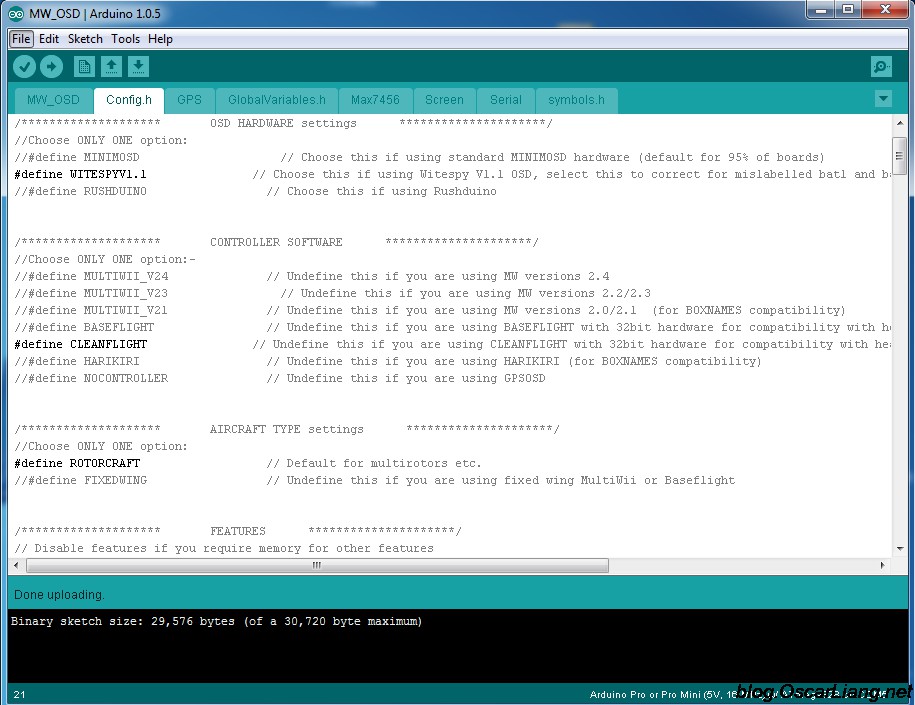
- เชื่อมต่ออะแดปเตอร์ FTDI (โปรแกรมเมอร์) กับ MinimOSD / Micro MinimOSD
- คลิกรวบรวมและอัปโหลด
OSD เป็นตัวช่วยที่มีประโยชน์สำหรับการบินด้วยกล้อง ในบทความนี้ เราจะดูว่า OSD คืออะไร เชื่อมต่อกับอุปกรณ์ FPV ของเราอย่างไร และสุดท้ายคือภาพรวมของความสามารถของ OSD ต่างๆ
หากคุณมีคำถามใด ๆ โปรดแจ้งให้เราทราบในความคิดเห็น
OSD คืออะไรและมีข้อดีอย่างไร
OSD หมายถึงการแสดงผลบนหน้าจอ - เช่น แสดงบนหน้าจอหรือเมนูบนหน้าจอ (เช่น ข้อมูลเพิ่มเติมบางส่วน ซึ่งส่วนใหญ่เป็นข้อความ จะแสดงที่ด้านบนของภาพหลัก ซึ่งมักจะมาจากกล้อง) ในงานอดิเรกของเรา OSD คือแผงวงจรขนาดเล็กที่แสดงพารามิเตอร์การบินเหนือรูปภาพจากกล้องของคุณ สิ่งนี้ทำให้คุณสามารถตรวจสอบสถานะของควอดคอปเตอร์ได้โดยตรงขณะบินโดยใช้กล้อง
หากคุณมีเซ็นเซอร์และ OSD ที่เหมาะสม คุณสามารถดูข้อมูลการบินได้โดยตรงในแว่นตาวิดีโอหรือบนจอภาพ เช่น แรงดันไฟฟ้าของแบตเตอรี่ ปริมาณกระแสไฟที่มอเตอร์และอุปกรณ์อิเล็กทรอนิกส์อื่นๆ กำลังวาด ระดับความสูงของคุณ พิกัด GPS เป็นต้น
ช่วยให้กล้องบินได้ปลอดภัยยิ่งขึ้น เพราะคุณสามารถดูระดับแบตเตอรี่ รู้ว่าเมื่อใดควรลงจอด บินไปไกลแค่ไหนแล้ว และควรกลับไปในทิศทางใด
OSD ไม่จำเป็นสำหรับการบินด้วยกล้อง แต่อย่างที่คุณเห็น มันมีประโยชน์อย่างยิ่ง คนส่วนใหญ่ซื้อ SimpleOSD อย่างน้อยเพื่อดูแรงดันไฟฟ้าของแบตเตอรี่ ซึ่งจำเป็นเพื่อหลีกเลี่ยงการคายประจุมากเกินไป (หากคุณบินไปไกล คุณจะไม่ได้ยินเสียงไซเรนแบตเตอรี่ต่ำ)
ประเภทของข้อมูลที่สามารถแสดงได้โดยใช้ OSD
รูปภาพแสดงชุดข้อมูลที่ใช้บ่อยที่สุดเมื่อบินไปรอบๆ กล้อง

ตัวจับเวลา
ขึ้นอยู่กับประเภทของ OSD ที่คุณมี นี่อาจเป็นเวลาบิน (นับจากช่วงเวลาที่คุณบินขึ้น) หรือเวลาปฏิบัติการ (เริ่มจากช่วงเวลาที่คุณเปิดเครื่องควอดคอปเตอร์) OSD บางตัวอนุญาตให้คุณแสดงตัวจับเวลาได้หลายประเภท
แรงดันแบตเตอรี่
OSD เกือบทั้งหมดอนุญาตให้คุณแสดงแรงดันไฟฟ้าได้ นี่เป็นข้อมูลที่สำคัญที่สุดเมื่อบินไปรอบๆ ห้องเพาะเลี้ยง เพื่อให้คุณรู้ว่าเมื่อใดควรลงจอด (โดยปกติฉันจะลงจอดเมื่อแรงดันไฟฟ้าลดลงเหลือ 3.5V ต่อเซลล์)
การบริโภคในปัจจุบัน
หากคุณมีเซ็นเซอร์ปัจจุบัน คุณสามารถติดตามว่ามอเตอร์ใช้กระแสไฟเท่าใดและแบตเตอรี่ของคุณถูกใช้ไปแล้วไปเท่าใด
อาร์เอสเอสไอ
RSSI เป็นตัวระบุความแรงของสัญญาณเครื่องส่งสัญญาณของคุณ ซึ่งโดยปกติจะแสดงเป็นเปอร์เซ็นต์ ยิ่งคุณบินไกลเท่าไร สัญญาณก็จะยิ่งอ่อนลง ข้อมูลนี้จะช่วยให้คุณรู้ว่าคุณควรหันหลังกลับเมื่อใด
RSSI เป็นเอาต์พุตจากตัวรับสัญญาณควบคุมของคุณ ซึ่งโดยปกติจะอยู่ในรูปแบบ PWM ดังนั้นอาจจำเป็นต้องใช้ตัวแปลง D/A และฟิลเตอร์ความถี่ต่ำผ่าน
คำเตือน
OSD บางตัวอาจแสดงการเตือน คำเตือนที่แตกต่างกัน คุณในฐานะผู้ใช้จะต้องตั้งค่าพารามิเตอร์ขีดจำกัด เช่น แรงดันไฟฟ้าของแบตเตอรี่ ค่า RSSI เป็นต้น
โหมดเครื่องบิน
แสดงโหมดการบินปัจจุบันของเครื่องบินของคุณ ข้อมูลนี้จะมีประโยชน์หากคุณสลับระหว่างโหมดต่างๆ บ่อยครั้ง เช่น Loiter (ลอยอยู่กับที่), โหมดแมนนวล, โหมดปรับระดับตัวเอง เพื่อที่คุณจะได้ไม่ต้องสงสัยว่าคอปเตอร์อยู่ในโหมดใด ในการดำเนินการนี้ คุณจะต้องเชื่อมต่อตัวควบคุมการบินเข้ากับ OSD
จีพีเอส
เมื่อใช้ GPS คุณจะไม่เพียงได้รับพิกัดของโดรนเท่านั้น แต่ยังรวมถึงระดับความสูงด้วย (แม้ว่าจะแม่นยำกว่าการใช้บารอมิเตอร์หรือโซนาร์ก็ตาม) ด้วยการคำนวณที่ชาญฉลาด เราจึงสามารถเห็นความเร็วสัมพันธ์กับพื้น ระยะทางไปยังจุดเริ่มต้น และพิกัดของมัน (การแสดงทิศทางไปยังจุดเริ่มต้นแบบกราฟิกเป็นสิ่งที่มีประโยชน์มาก โดยเฉพาะอย่างยิ่งหากคุณหลงทางเล็กน้อย)
ขอบฟ้า
ขอบฟ้าเสมือนจริงจะช่วยให้คุณเข้าใจว่าโดรนเอียงไปในอวกาศได้อย่างไร
การเชื่อมต่อ OSD ในกล้อง เครื่องส่งวิดีโอ และตัวควบคุมการบิน
ฉันจะแบ่ง OSD ทั้งหมดออกเป็น 3 ประเภท:
- OSD แบบสแตนด์อโลน
- OSD ขึ้นอยู่กับตัวควบคุมการบิน
- ไฮบริด
OSD แบบสแตนด์อโลนเชื่อมต่อกับกล้องและตัวส่งสัญญาณวิดีโอเท่านั้น และจะไม่สื่อสารกับตัวควบคุมการบิน บางครั้งสามารถเชื่อมต่อโดยตรงกับ GPS หรือเซ็นเซอร์อื่นๆ เพื่อเข้าถึงการอ่านได้ ตัวอย่างที่ดีของประเภทนี้คือ Skylark OSD (+GPS และเซ็นเซอร์ปัจจุบัน) และ Super Simple OSD
OSD ที่ขึ้นกับคอนโทรลเลอร์อาศัยข้อมูลจากตัวควบคุมการบินเท่านั้น ซึ่งโดยปกติจะผ่านทางพอร์ตอนุกรม (RX/TX) OSD เองไม่ได้ทำอะไรนอกจากแสดงข้อมูลนี้ MinimOSD พร้อม Hobbyking เป็นตัวอย่างที่ดีของ OSD ประเภทนี้ (หากเวอร์ชันไม่มีการดัดแปลง เช่น KV mod) ข้อดีของประเภทนี้คือ OSD ใช้ข้อมูลที่ได้รับจากเซ็นเซอร์ของตัวควบคุม ซึ่งหมายความว่าตัวควบคุมจะใช้ข้อมูลนี้เพื่อทำให้การจัดการและการควบคุมง่ายขึ้น แม้ว่าในกรณีของ OSD แบบสแตนด์อโลน ตัวควบคุมการบินจะไม่สามารถใช้ข้อมูลจากเซ็นเซอร์ที่เชื่อมต่อกับ OSD ได้
OSD ประเภทไฮบริดสามารถใช้เป็น OSD แบบสแตนด์อโลนได้ (โดยมีฟังก์ชันการทำงานที่จำกัด) และยังสามารถเชื่อมต่อกับตัวควบคุมเพื่อเพิ่มช่วงของข้อมูลเที่ยวบินที่แสดง MinimOSD พร้อมม็อด KV เป็นตัวอย่างที่ดีของ OSD ประเภทนี้: หากใช้เป็นสแตนด์อโลน คุณจะเห็นเฉพาะ RSSI และแรงดันไฟฟ้า แต่เมื่อเชื่อมต่อกับคอนโทรลเลอร์ด้วย GPS คุณจะเห็นโหมดการบินปัจจุบัน พิกัด GPS ระดับความสูง ฯลฯ
การเชื่อมต่อที่ง่ายที่สุดคือ OSD แบบสแตนด์อโลน
ตามตัวอย่าง เชื่อมต่อ Hobbyking Super Simple OSD เข้ากับกล้อง FPV, เครื่องส่งวิดีโอ และแบตเตอรี่ลิเธียม 3S

ตามทฤษฎี คุณสามารถตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่ก้อนที่สองได้โดยใช้พอร์ต Bat2
การเชื่อมต่อ OSD แบบไฮบริด
ฉันทราบว่าในกรณีนี้ OSD จะวัดแรงดันไฟฟ้าของแบตเตอรี่และระดับ RSSI อย่างอิสระ (แม้ว่าจะสามารถเชื่อมต่อกับคอนโทรลเลอร์และส่งข้อมูลผ่านพอร์ตอนุกรมได้ แต่ทั้งสองตัวเลือกก็ทำงานได้ดี)
หากคุณต้องการแสดงพิกัด ทิศทางไปยังจุดเริ่มต้น และระยะทาง คุณต้องเชื่อมต่อ GPS เข้ากับ Naze32

OSD ที่ผมใช้อยู่แล้ว
MinimOSD พร้อมด้วย KV Team Mod
ปัจจุบัน MinimOSD เป็น OSD ที่ฉันชื่นชอบและเป็นสิ่งที่ฉันใช้ เมื่อดาวน์โหลดเฟิร์มแวร์ที่เหมาะสม MinimOSD จะสามารถใช้ได้กับบอร์ด Naze32, CC3D, Multiwii, APM และ PixHawk นี่เป็นบอร์ดที่ดีมากที่สามารถแสดงข้อมูลเที่ยวบินใด ๆ ที่มีอยู่ในเซ็นเซอร์ได้

MinimOSD สามารถแสดงข้อมูลใด ๆ ที่มีอยู่จากเซ็นเซอร์
Hobbyking และ Banggood ขาย MinimOSD แต่มีเวอร์ชันดั้งเดิมซึ่งไม่มีหมุดเพิ่มเติมที่ด้านข้างสำหรับ RSSI แรงดันแบตเตอรี่ ฯลฯ ฉันจะไม่รบกวนพวกเขาหากมีโอกาสซื้อ MinimOSD KV Mod
MinimOSD ไมโคร

OSD เดียวกันกับที่อธิบายไว้ข้างต้น ความแตกต่างคือขนาดที่เล็กกว่า นอกจากนี้ยังไม่มีตัวแปลง 12V -> 5V แต่สิ่งนี้ไม่สำคัญเพราะ อย่างไรก็ตามไม่มีใครใช้ตัวแปลงนี้เนื่องจากบอร์ดร้อนเกินไป
สมองFPV
บอร์ดนี้ยังแสดงทุกอย่างหากคุณมีเซ็นเซอร์ที่เหมาะสม

ในบทความนี้เราจะดูการเชื่อมต่อ เฟิร์มแวร์ และการกำหนดค่า MinimOSD นอกจากนี้เรายังจะตอบคำถามว่าต้องทำอย่างไรหากมีอะไรผิดพลาด และต้องทำอย่างไรเพื่อไม่ให้เรื่องจบลงอย่างน่าเศร้า
« Petka - อุปกรณ์!?!? -สามร้อย!!! - สามร้อยอะไร??? “แล้วอุปกรณ์ล่ะ?”
MinimOSD. ผ้าพันคอราคาถูกและมีประโยชน์มาก ช่วยให้คุณเห็นว่าเกิดอะไรขึ้นกับคอปเตอร์ - แรงดันไฟฟ้าปัจจุบัน, จำนวนแอมป์ที่ใช้ไป, จำนวนดาวเทียมระบุตำแหน่งทั่วโลกที่ถูกจับได้ และยังป้องกันไม่ให้คุณ "หลงทาง" บนท้องฟ้า เป็นไปไม่ได้ที่จะหลงทางบนท้องฟ้าใช่ไหม? แต่มันเป็นไปได้มาก เริ่มจากชั้นประถม “ฉันเอาออก โอ้ แต่ทุกอย่างแตกต่างไปจากข้างบน...โอ้ ฉันอยู่ที่ไหน” ไปจนถึงสภาพการบินที่ยากลำบาก เช่น บินในความมืดหรือฝนตก หรือบินไปในก้อนเมฆโดยไม่ตั้งใจ ดังในวิดีโอด้านล่าง:
ในนาทีที่สี่ มีเพียงลูกศร "บ้าน" ช่วยชีวิตเท่านั้นที่ระบุว่าจะบินไปที่ไหน
เอาล่ะ โอเค เนื้อเพลงเพียงพอแล้ว มาฝึกซ้อมกัน!
การตระเตรียม.
คุณได้สั่ง MinimOSD แล้ว บน Bangood หรือ Hobbyking หรือ RCTimer - ไม่สำคัญว่าจะอยู่ที่ไหน และเราได้รับสิ่งนี้:
มือของฉันรู้สึกอยากเชื่อมต่อกับเวิร์คสเตชั่นแล้วดูว่ามันแสดงอะไร แต่คุณไม่จำเป็นต้องทำสิ่งนี้ทันที! มันเต็มไปด้วยการสั่งซื้อ OSD ใหม่ - และนี่คือเวลาที่เสียไป (ซึ่งเป็นสิ่งสำคัญ) และแน่นอนว่าสูญเสียเงินไป
บนบอร์ดมีชิปขนาดใหญ่สองตัว: ATMEGA328P และ MAX7456 ชิปตัวแรก (เพื่อให้แม่นยำยิ่งขึ้น) มีหน้าที่สื่อสารกับตัวควบคุมการบิน ("ส่วนดิจิทัล" ของบอร์ด) และอย่างที่สองคือ OSD ขาวดำช่องทางเดียว (OnScreenDisplay - เมนูบนหน้าจอ) จาก Maxim เรียกมันว่า "ส่วนอะนาล็อก" ของบอร์ด ดังนั้น MAX7456 นี้จึงเป็นชิปที่ค่อนข้างไม่แน่นอน ไม่ชอบความร้อนสูงเกินไป ไม่ชอบการกระโดดอย่างกะทันหันระหว่างกราวด์ "ดิจิทัล" และกราวด์ "แอนะล็อก" - พูดง่ายๆ ก็คือ มันจะไหม้ได้ง่าย และโชคดีที่คนจีนขี้เกียจไม่เคยบัดกรีแผงระบายความร้อนมาตรฐานของไมโครวงจร (บน "ท้อง") หากคุณใช้ผ้าพันคอเหมือนเดิม MAX จะไหม้ - รับประกัน 80% เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้น ให้บัดกรีสามรูที่มีเครื่องหมายไว้ในรูปภาพด้านล่าง

ในการทำเช่นนี้ให้สอดบัดกรีบาง ๆ (เส้นผ่านศูนย์กลาง 1 มม. โดยควรมีฟลักซ์) เข้าไปในรูแล้วให้ความร้อนด้วยหัวแร้ง:

และนี่คือผลลัพธ์ (การบัดกรีไม่ค่อยดีนัก แต่เท่าที่จะทำได้ คุณจะทำได้ดียิ่งขึ้น!)

ตอนนี้เกี่ยวกับคุณสมบัติการเชื่อมต่อ ผู้เอาใจใส่สังเกตเห็นว่าฉันบัดกรีจัมเปอร์ที่อยู่ด้านบน มีหลายวิธีในการเชื่อมต่อ MinimOSD และสำเนาจำนวนมากเสียหายซึ่งดีกว่าหรือถูกต้องมากกว่าหรือรบกวนน้อยกว่า ฉันใช้วิธีการเชื่อมต่อที่รวมกราวด์ดิจิทัลและแอนะล็อก และจ่ายไฟ 5 โวลต์จากส่วน "ดิจิทัล" เนื่องจาก minimOSD สิ้นเปลืองพลังงานค่อนข้างมาก จึงควรจ่ายไฟให้บอร์ดจากแหล่งพลังงานแยกต่างหากจะดีกว่า ดูเหมือนว่านี้เกือบจะ:

นั่นคือฉันบัดกรีจัมเปอร์ที่ด้านบนเพื่อรวมดินแดนเข้าด้วยกัน และคุณยังต้องเพิ่มจัมเปอร์หนึ่งตัวที่ด้าน "ด้านหน้า" ของบอร์ดด้วย

การเชื่อมต่อและการตั้งค่า
ทุกอย่างบัดกรีแล้วตอนนี้ผ้าพันคอของเราพร้อมที่จะเชื่อมต่อกับคอมพิวเตอร์แล้ว ในการดำเนินการนี้ เราจำเป็นต้องมีอะแดปเตอร์ FTDI (เช่น หรืออะแดปเตอร์ USB-UART TTL อื่นๆ)

เราเชื่อมต่อโดยใช้สายไฟ 5 เส้นแผนภาพการเชื่อมต่อมีดังนี้: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (จากด้าน OSD) - เชื่อมต่อกับอะแดปเตอร์ FTDI 1. DTR, 2. Rxi, 3 .Txo, 4.VCC, 5.GND. นี่คือรูปถ่ายของวิธีการเชื่อมต่อสำหรับฉัน:

หากยังไม่ชัดเจน โปรดดูวิดีโอนี้ โดยเฉพาะนาทีที่ 1:03
ตอนนี้จะดาวน์โหลดอะไรและกำหนดค่าอย่างไร ก่อนอื่นฉันจะบอกว่าเฟิร์มแวร์สำหรับคอปเตอร์และเครื่องบินนั้นแตกต่างกัน นอกจากนี้ยังมีเฟิร์มแวร์สำหรับ Multivia (kvTeam) และยังมี mods แยกจากการทำงานอิสระ (ไม่มีตัวควบคุมการบิน) ไปจนถึงการเชื่อมต่อแม้แต่กับ Naza
แต่ที่นี่เรากำลังพิจารณากรณี "คลาสสิก" - คอปเตอร์บนตัวควบคุมเวิร์กสเตชันอัตโนมัติ หน้าโครงการอย่างเป็นทางการ หน้าดาวน์โหลด (สำหรับคอปเตอร์ภายใต้เวิร์กสเตชันอัตโนมัติ คุณต้องดาวน์โหลด ExtraCopter) แต่สิ่งเหล่านี้เป็นเวอร์ชันเก่า ผู้คนปรับเปลี่ยนไปค่อนข้างมากตั้งแต่นั้นมา เฟิร์มแวร์สมัยใหม่ตั้งอยู่ที่นี่ ในขณะที่เขียนนี่คือเฟิร์มแวร์ R800 ซึ่งอยู่บน Ya.Disk (ผู้ใช้ MinimOSD_Extra, รหัสผ่าน Top_Secret)
ไฟล์เก็บถาวรประกอบด้วยเฟิร์มแวร์ (ไฟล์ HEX) ไฟล์ที่มีแบบอักษร (ไฟล์ mcm) และตัวโปรแกรมเอง (OSD_Config.exe)
ก่อนอื่นให้ไปที่ตัวจัดการอุปกรณ์และตรวจสอบความเร็วของพอร์ต FTDI (ตั้งค่าเป็น 115200):

เราเปิดตัวโปรแกรม OSD_Config.exe เลือกพอร์ตกดปุ่ม "อ่านจาก OSD" ควรมีข้อความเกี่ยวกับการอ่านที่สำเร็จ เนื่องจากไม่ทราบว่าเฟิร์มแวร์ชนิดใดที่โหลดมาจากโรงงาน เพื่อหลีกเลี่ยงปัญหาในอนาคต เราจะอัปโหลดอันใหม่ โดยคลิกเมนู Optios>อัพเดตเฟิร์มแวร์

เลือกไฟล์และอัปโหลด
เราจะได้รับข้อความเกี่ยวกับเฟิร์มแวร์ที่ประสบความสำเร็จ

จากนั้นคอนโทรลเลอร์จะเริ่มต้นและโหลดการตั้งค่าลงในโปรแกรมซึ่งจะรายงาน

ถึงเวลาดาวน์โหลดไฟล์ที่มีแบบอักษรที่สอดคล้องกับเฟิร์มแวร์ (หากยังไม่เสร็จสิ้นรูปลักษณ์ของ OSD อาจดูตลกมากหรืออ่านไม่ออกเลย) คลิกเมนูตัวเลือก>อัปเดต Charset

เลือกไฟล์ MCM แล้วอัปโหลด

เรากำลังรอความพร้อม

หลังจากกรอกข้อมูลแล้ว คอนโทรลเลอร์จะเริ่มทำงานอีกครั้ง



ให้ฉันอธิบายเล็กน้อย:
ช่อง RSSI — การแปลง RSSI เป็นเปอร์เซ็นต์ โดยที่ 5 โวลต์คือ 255 (สูงสุดในระบบฐานแปด) และตัวรับสัญญาณ FRsky มีสัญญาณสูงสุด 3.3 โวลต์ หากคุณทำเครื่องหมายที่ช่อง RSSI เปิดใช้งาน RAW จากนั้นบนหน้าจอ FPV เราจะเห็นข้อมูล "ดิบ" นี่คือสิ่งที่เราสามารถใส่ลงในการตั้งค่าได้ หรือคุณสามารถป้อนค่าของฉันได้
ความละเอียดอ่อนอีกอย่างหนึ่ง - การสลับหน้าจอ OSD- ดังที่คุณเห็นว่ามีแผงข้อมูลสองแผง เราสามารถสลับไปใช้ตัวเลือกการแสดงผลได้สามแบบ - screen1 (Panel1), screen2 (Panel2), หน้าจอว่างโดยไม่มีข้อมูล (Disabled) ในการดำเนินการนี้ ก่อนอื่นเราต้องตัดสินใจว่าเราจะสลับระหว่างหน้าจออย่างไร ตัวอย่างเช่นหากเราสลับระหว่างหน้าจอโดยใช้ปุ่มหมุนหรือสวิตช์สลับสามตำแหน่งเราจะมีค่าสามช่วงตามช่องสัญญาณ (Panel1: 0-1233, Panel2: 1233-1467, Disabled: 1467- 1701) ในกรณีนี้จะต้องปิดปุ่มสลับการหมุน และหากเราสลับด้วยสวิตช์สลับสองตำแหน่งธรรมดา การเปิดใช้งานการสลับการหมุนก็สมเหตุสมผล ในเวลาเดียวกัน เมื่อเปิดสวิตช์สลับ เราจะสลับหน้าจอทีละหน้าจอ (Panel1 -> Panel2 -> Disabled -> Panel1 ......) ทันทีที่สวิตช์สลับปิดอยู่ การสลับ ระหว่างหน้าจอจะหยุดลง ช่องใดที่จะสลับหน้าจอจะถูกกำหนดในรายการแบบเลื่อนลงชื่อ OSD Toggle Channel ฉันใส่ช่องหมายเลข 6 ไว้ และมีการซุ่มโจมตีอีกครั้งที่ทำให้บางคนสับสน (รวมถึงฉันด้วย) ในตอนแรก - คำเตือนสวิตช์แผงอัตโนมัติ รายการนี้กำหนดว่าจะสลับหน้าจอใดหากมีคำเตือนที่กำหนดไว้ก่อนหน้านี้เกิดขึ้น ดูเหมือนว่าทุกอย่างชัดเจน คุณกำลังบิน มีบางอย่างเกิดขึ้นระหว่างการบิน OSD สลับไปที่หน้าจอที่คุณตั้งไว้ แต่นี่คือคำถาม - เราขอให้สลับระหว่างหน้าจอตามกฎแล้วนี่คือการตั้งค่าที่บ้าน คอปเตอร์ไม่บิน เราต้องการตรวจสอบ - หน้าจอไม่สลับ! แต่เนื่องจากตามกฎแล้วที่บ้านไม่มี GPS Fix พูดง่ายๆ ก็คือคำเตือนดับลง! ดังนั้นการสลับระหว่างหน้าจอจึงไม่ทำงาน... :)
ฉันไม่รู้ว่าพารามิเตอร์ที่เหลือจำเป็นต้องมีคำอธิบายหรือไม่ บางทีฉันจะเพิ่มในบทความในภายหลัง
ฉันจะบอกว่าเมื่อตั้งค่าหน้าจอหลักคุณไม่ควรผลักทุกอย่างไปพร้อมกัน เป็นการดีกว่าที่จะปิดทุกอย่างก่อน (ในคอลัมน์ด้านซ้าย) จากนั้นจึงเปิดเฉพาะสิ่งที่จำเป็นและวางไว้ในส่วนที่ต้องการของหน้าจอทันที ฉันขอแนะนำให้เว้นพื้นที่ว่างไว้บริเวณขอบหน้าจอ จอภาพหรือ DVR สามารถตัดออกได้โดยใช้ปากกาหรือแว่นตา
ต่อไปอีกประเด็นสำคัญ - การตั้งค่า OSD ใน Mission Planner- สมมติว่าคุณได้เชื่อมต่อทุกอย่างตามที่ควรจะเป็น แต่แทนที่จะใช้ตัวเลขตลก ๆ และตัวบ่งชี้ทัศนคติ เราเห็นคำจารึกที่น่าเบื่อว่า "ไม่มีข้อมูล Mavlink" ซึ่งหมายความว่า OSD ใช้งานได้ ยินดีที่จะแสดงบางอย่างให้คุณดู แต่ไม่ได้รับข้อมูล นั่นคือพิน Rx จะไม่ได้รับข้อมูลใด ๆ จากเวิร์กสเตชัน สาเหตุแรกที่เป็นไปได้คือสายไฟปะปนกันเมื่อเชื่อมต่อ ตรวจสอบว่า Rx จาก OSD เชื่อมต่อกับพอร์ต Tx บนเวิร์กสเตชัน เหตุผลที่สองที่เป็นไปได้คือตัวควบคุมไม่ได้รับการกำหนดค่าให้ส่งข้อมูลไปยังพอร์ต COM หากต้องการทำสิ่งนี้ ในกรณีง่ายๆ บนแท็บ การตั้งค่าเริ่มต้น > ฮาร์ดแวร์เสริม > OSD คุณต้องคลิกปุ่ม เปิดใช้งานการวัดและส่งข้อมูลทางไกล ในกรณีนี้ MP จะกำหนดค่าพารามิเตอร์จำนวนหนึ่งโดยอัตโนมัติเพื่อให้คุณสามารถส่งข้อมูลไปยัง OSD ได้ หากปุ่มวิเศษนี้ไม่ช่วย คุณจะต้องกำหนดค่าทุกอย่างด้วยตนเอง ในการดำเนินการนี้ ให้ไปที่แท็บ การกำหนดค่า/การปรับแต่ง > รายการพารามิเตอร์ทั้งหมด เลื่อนลงไปที่ตัวอักษร S และตรวจสอบ (หรือแก้ไข) ค่าพารามิเตอร์:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSITION = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
หากข้อมูลยังไม่ไหลและเรายังคงเห็นข้อความเศร้า "ไม่มีข้อมูล Mavlink" เราต้องตรวจสอบว่า OSD เชื่อมต่อกับพอร์ตที่ถูกต้องหรือไม่ (บทความพูดถึง UART0) บางทีพารามิเตอร์ SR1 อาจมีประโยชน์ ให้กับคุณ (เช่นเดียวกับที่อธิบายไว้ข้างต้นสำหรับพอร์ต UART1 เท่านั้น) อาจเป็นไปได้ว่า OSD ของคุณพร้อมกับโมเด็มมาตรระยะไกลไม่ทำงาน - ในกรณีนี้คุณอาจต้องเชื่อมต่อหรือถอดสาย Tx บน OSD ในทางกลับกัน นอกจากนี้ยังมีข้อผิดพลาดที่ OSD ไม่ทำงานเมื่อเชื่อมต่อสาย USB เข้ากับคอมพิวเตอร์ หรือบางทีคุณอาจแค่มีสายไฟปะปนกัน...
ฉันจะแบ่งปันอีกหนึ่งภาพ บนคอนโทรลเลอร์ของฉัน พอร์ต telemetry หลักหยุดทำงานเนื่องจากการขัดข้อง ฉันเพิ่งบัดกรีมันไปที่ UART0 แล้วฉันก็ชอบการเชื่อมต่อนี้

ที่นี่ฉันขับเคลื่อนมันโดยตรงจากคอนโทรลเลอร์ แต่คุณต้องตรวจสอบสิ่งที่เหลืออยู่ 5 โวลต์ให้กับคอนโทรลเลอร์เอง ในกรณีของฉันตัวควบคุมนั้นใช้พลังงานจากตัวรับและตั้งค่าให้สูงกว่า 5 โวลต์เล็กน้อย ดังนั้นเมื่อคำนึงถึงตัวรับและ minimOSD สำหรับ APM นั้นจะอยู่ที่ 5 โวลต์อย่างเคร่งครัด
เราต้องสัมผัสอีกประเด็นหนึ่ง หากคุณแฟลช OSD ไม่ถูกต้อง ข้อผิดพลาด “ ไม่สามารถพูดคุยกับ bootloader ได้- ข้อผิดพลาดนี้แปลตามตัวอักษรว่า "ข้อผิดพลาดในการพูดคุยกับ bootloader" อาจเกิดขึ้นได้ในกรณีที่สายไฟปะปนกันหรือเมื่อโหลดเดอร์หลวม หากทุกอย่างชัดเจนในกรณีของสายไฟ (ดูวิธีเชื่อมต่ออย่างถูกต้องด้านบน) ในกรณีของ bootloader จำเป็นต้องมีขั้นตอนในการกู้คืนไมโครคอนโทรลเลอร์
กำลังกู้คืน Bootloader
สำหรับสิ่งนี้เราจำเป็นต้องมีโปรแกรมเมอร์เป็นอย่างน้อย การใช้ USBasp สะดวกกว่า

บางทีคุณอาจจะชอบอะแดปเตอร์นี้ (ISP10<>ISP6)
 หรือสายนี้ (มีใน)
หรือสายนี้ (มีใน)

โดยทั่วไปไม่ทางใดก็ทางหนึ่งเราเชื่อมต่อกับ ATMega328P โดยใช้โปรแกรมเมอร์
pinout ของตัวเชื่อมต่อ ISP บนบอร์ด OSD สอดคล้องกับขั้วต่อที่ยอมรับโดยทั่วไป โดยปกติแล้วการติดต่อครั้งแรกจะเป็นสี่เหลี่ยมจัตุรัส ถ้าไม่เช่นนั้น ควรตรวจสอบด้วยการติดตาม Vcc และ GND จะดีกว่า

โดยปกติแล้วหมุดจะถูกลงนามในโปรแกรมเมอร์ หากไม่มี ก็มักจะมีลักษณะดังนี้:

ในการดำเนินการนี้ ขั้นแรกให้เลือกประเภทของโปรแกรมเมอร์

จากนั้นเลือกประเภทบอร์ด

และชนิดไมโครคอนโทรลเลอร์


และรอประมาณหนึ่งนาทีเพื่อให้ bootloader โหลด (ดูที่แถบสถานะสีเขียวที่ด้านล่าง)
 จนกระทั่งมีข้อความปรากฏขึ้นเพื่อแจ้งว่า bootloader สำเร็จแล้ว
จนกระทั่งมีข้อความปรากฏขึ้นเพื่อแจ้งว่า bootloader สำเร็จแล้ว

(อย่าใส่ใจกับข้อผิดพลาดด้านล่าง คุณต้องอัปเดตเฟิร์มแวร์โปรแกรมเมอร์)
จากนั้นไปที่ OSD_Config.exe อัปโหลดเฟิร์มแวร์และแบบอักษรตามที่อธิบายไว้แล้ว คุณอาจต้องอัปโหลดเฟิร์มแวร์สองครั้ง (ต้องใช้เวลาเพิ่มเติมหนึ่งครั้งเพื่อเริ่มต้นคอนโทรลเลอร์อย่างเหมาะสมหลังจากอัปโหลด Bootloader)
นั่นดูเหมือนจะเป็นทั้งหมด เผื่อใครไม่รู้ยังมีอีกนะ หากมีบางอย่างไม่ชัดเจนที่นี่ คุณสามารถดู "สด" ได้ที่นั่น
ขอให้โชคดีกับการติดตั้ง OSD บนคอปเตอร์ของคุณ!
เป็นของคุณเสมอ กาเนียฟ ติมูร์ - 5yoda5.
5yoda5#apmcopter
อัปเดต 11/11/2558:“ ทุกอย่างบัดกรีแล้วตอนนี้ผ้าพันคอของเราก็พร้อมที่จะเชื่อมต่อกับคอมพิวเตอร์แล้ว ในการทำเช่นนี้ เราจำเป็นต้องมีอะแดปเตอร์ FTDI (เช่น บน RCTimer หรืออะแดปเตอร์ USB-UART TTL อื่นๆ)
อัปเดต 03/11/2559: เพิ่มรูปภาพ pinout ของ ISP
หากคุณพบข้อผิดพลาดบนเพจให้คลิก กะ + เข้าสู่หรือแจ้งให้เราทราบ
สำหรับผู้ใช้คอนโทรลเลอร์ APM อุปกรณ์พิเศษได้รับการพัฒนาสำหรับการซ้อนทับข้อมูลโทรมาตร - Minim OSD OSD ย่อมาจากภาษาอังกฤษ On Screen Display ซึ่งหมายถึงการแสดงข้อมูลเพิ่มเติมบนหน้าจอของผู้ปฏิบัติงาน
ผู้ผลิตในจีนสร้างตัวควบคุมการบินทั้งคู่ - ตัวควบคุม HKPliot Mega, ArduFlyer และ OSD - MAVLink-OSD

ภายนอก Minim OSD ไม่แตกต่างจาก MAVLink-OSD มากนัก มันเหมือนกับสำเนากระจกของบอร์ดที่ชิปหลักหมุน 45 องศา นอกจากนี้ MAVLink-OSD ยังไม่มีจัมเปอร์สำหรับเลือกประเภทของสัญญาณวิดีโอและรวมแหล่งจ่ายไฟของชิ้นส่วนดิจิทัลและอนาล็อก
Minim OSD v1.0 มีปัญหาเรื่องความร้อนสูงเกินไปเมื่อใช้พลังงานกล้องจาก 12 โวลต์ ปัญหานี้ได้รับการแก้ไขแล้วในเวอร์ชัน v1.1
เนื่องจากฮ่องกงมีปัญหากับการจัดส่งเมื่อปลายปี 2556 ฉันจึงสั่งซื้อ MAVLink-OSD จาก RCTimer

ในการเขียนโปรแกรมคุณจะต้องมีอะแดปเตอร์ FTDI อย่างแน่นอน ดังนั้น ฉันจึงใช้อะแดปเตอร์ FTDI Tool V1.0 ร่วมกับ MAVLink-OSD http://www.rctimer.com/product_684.html ด้วย

ในการกำหนดค่าและแฟลชอุปกรณ์ คุณจะต้องมีซอฟต์แวร์พิเศษที่เรียกว่า ArduCam-OSD คุณสามารถดาวน์โหลดซอฟต์แวร์และเฟิร์มแวร์ ArduCam-OSD เวอร์ชันล่าสุดได้ที่นี่ http://code.google.com/p/arducam-osd/downloads/list ปัจจุบันเวอร์ชันปัจจุบันคือ 2.0
คุณยังสามารถติดตั้งเฟิร์มแวร์สำรองได้ โปรเจ็กต์นี้เรียกว่า minimosd-extra ข้อมูลอยู่ที่นี่https://code.google.com/p/minimosd-extra/ ในการติดตั้งเฟิร์มแวร์ คุณจะต้องมียูทิลิตี้ของคุณเอง - MinimOSD-Extra Config Tool ตามกฎแล้วไฟล์เก็บถาวรจะมียูทิลิตี้และเฟิร์มแวร์ คุณสามารถดาวน์โหลดได้ที่นี่ https://code.google.com/p/minimosd-extra/downloads/list จำนวนเวอร์ชันเวียนหัว
บอร์ดและอะแดปเตอร์ถูกหุ้มด้วยฟิล์มหด
คอนโทรลเลอร์มีขั้วต่อการเชื่อมต่อที่ไม่สะดวกมากแบบหกพินโดยไม่มีการป้องกันที่เข้าใจผิดได้ หน้าสัมผัสทั้งหมดใช้สำหรับการเขียนโปรแกรม แต่ใช้เพียง 4 หน้าสัมผัสเพื่อเชื่อมต่อกับตัวควบคุมการบิน
สำหรับการเขียนโปรแกรม สิ่งที่คุณต้องทำคือหาสาย mini-USB

สำหรับขั้วต่อสี่พินนั้นทุกอย่างซับซ้อนกว่า หากคุณผสมและเชื่อมต่อไม่ถูกต้อง ควันอาจออกมาได้
OSD เชื่อมต่อกับตัวควบคุมการบินในขั้วต่อการวัดและส่งข้อมูลทางไกล ต้องเชื่อมต่อสายไฟเข้ากับ OSD เข้ากับหน้าสัมผัสส่วนกลาง: GND, VCC, RX, TX
หากเราใช้โมเด็มวิทยุเราจะเชื่อมต่อแบบขนาน เลยต้องบัดกรีสาย Y

ภาพถ่ายแสดงสายไฟสำหรับตัวควบคุม AIOP ซึ่งมี GPS เชื่อมต่ออยู่กับขั้วต่อเดียว
ฉันไม่ได้ถอดสายไฟที่ไปที่ TX ของ OSD ของฉันออกเพื่อให้เป็นแบบสากล คุณไม่มีทางรู้ว่าฉันจะใช้สายนี้ที่ไหนอีก
ควรสังเกตว่าถ้าคุณไม่จ่ายไฟ 5 โวลต์ให้กับส่วนอะนาล็อกของบอร์ด บอร์ดจะยังคงเงียบอยู่

แหล่งข้อมูลบางแห่งแนะนำให้สร้างบอร์ดใหม่และจ่ายไฟให้กับส่วนอะนาล็อกจากส่วนดิจิทัล แต่ฉันไม่ได้ทำเช่นนี้เนื่องจากมีความเห็นว่าอาจเกิดการรบกวนได้
สำหรับผู้ที่ตัดสินใจต่อจากแหล่งพลังงานเดียววงจรจะเป็นดังรูป

ในขณะนี้ ส่วนแอนะล็อกของฉันขับเคลื่อนโดยตัวส่งสัญญาณวิดีโอ ซึ่งฉันได้พูดถึงไปแล้วในบทความที่แล้ว
การกำหนดค่า ArduCAM OSD
เริ่มต้นด้วยยูทิลิตี้ ArduCAM OSD Config ดั้งเดิม ปัจจุบันเวอร์ชันปัจจุบันคือ 2.1.2.0
องค์ประกอบหลักประกอบด้วยเมนูโปรแกรม เช่นเดียวกับสามแท็บที่สลับระหว่างหน้าจอต่อไปนี้: กำหนดค่า แผง 1 แผง 2
กำหนดค่าทุกอย่างชัดเจนที่นี่
ก่อนอื่น ให้เลือกหมายเลขพอร์ตแล้วกดปุ่ม Read From OSD

ควรสังเกตว่าสัญญาณวิดีโอประเภท NTSC - PAL ถูกสลับผ่านเมนูโปรแกรมโหมดวิดีโอ รายการเมนูไฟล์ช่วยให้คุณสามารถบันทึกและโหลดการตั้งค่าของคุณ หรือไปที่การตั้งค่าเริ่มต้น ในเมนูตัวเลือก คุณสามารถเปิดใช้งานโหมดกริดสำหรับ Panel1 และ 2 อัปเดตเฟิร์มแวร์ เลือกภาพพื้นหลัง ใช้บันทึกสำหรับการตั้งค่า และเพิ่มแบบอักษรของคุณเอง

แผงที่ 1 ใช้เพื่อกำหนดค่าข้อมูลที่แสดงที่ด้านบนของวิดีโอสำหรับหน้าจอแรก การสลับช่องถูกตั้งค่าเป็นช่องควบคุมวิทยุอิสระ OSD Toggle Channel

ดังนั้นเราจึงกำหนดค่าแผง 2 สำหรับหน้าจอที่สอง

เฟิร์มแวร์ได้รับการอัพเดตโดยใช้ยูทิลิตี้เดียวกัน

MinimOSD-เครื่องมือกำหนดค่าพิเศษ
เมื่อเราเปิดโปรแกรม MinimOSD-Extra Config Tool ดูเหมือนว่าเราจะผสมโฟลเดอร์ต่างๆ และเปิด ArduCAM OSD Config อีกครั้ง นี่เป็นความประทับใจแรกอันที่จริงมันคล้ายกันมาก แต่มีการตั้งค่ามากกว่านั้น
ลองดูความแตกต่างที่สำคัญ
ขั้นตอนแรกคือการเลือกประเภทรุ่น: เครื่องบิน, คอปเตอร์
เพิ่มตัวเลือกเมื่อมีคำเตือนเกิดขึ้น หน้าจอจะสลับไปยังรายการที่ระบุไว้ในเมนูแบบเลื่อนลงโดยอัตโนมัติ (Warnings Auto Panel Switch) นี่เป็นสิ่งจำเป็น เช่น เมื่อข้อมูลทั้งหมดถูกลบออกจากหน้าจอที่สอง เพื่อไม่ให้สิ่งใดรบกวนการมองเห็น
แบตเตอรี่สามารถแสดงเป็นเปอร์เซ็นต์หรือ mA
และอีกหนึ่งบล็อก แสดงเครื่องหมายก่อนค่า ซึ่งมีหน้าที่แสดงไอคอนก่อนค่า

หน้าจอแรก

หน้าจอที่สอง

ผลลัพธ์
ก่อนอื่นฉันติดตั้งเฟิร์มแวร์ผ่าน ArduCAM OSD Config

โดยหลักการแล้วทุกอย่างเรียบร้อยดี แต่ฉันกังวลเกี่ยวกับความแตกต่างเล็กน้อยซึ่งแสดงดังต่อไปนี้
หลังจากเชื่อมต่ออุปกรณ์ ฉันสังเกตเห็นบนหน้าจอว่าข้อมูลบางส่วนทางด้านซ้ายถูกตัดออกไป ไอคอนด้านหน้าค่าพารามิเตอร์หายไปครึ่งหนึ่ง ฉันตัดสินใจลองเปลี่ยนประเภทสัญญาณเป็น PAL แต่สุดท้ายกลับแย่ลงไปอีก มันตัดด้านบนและด้านล่างของหน้าจอออก ดังนั้นฉันจึงเปลี่ยนกลับเป็น NTSC ปล่อยให้มันอยู่ด้านเดียวไม่ใช่สามด้านโดยเฉพาะอย่างยิ่งเนื่องจากทางด้านซ้ายคุณสามารถลองแก้ไขข้อบกพร่องนี้ได้

ข้อมูลที่ย้ายจะบล็อกอักขระหนึ่งตัวทางด้านขวา

การผ่าตัดไม่เจ็บปวดมีพื้นที่เพียงพอสำหรับสิ่งนี้


ในที่สุดทุกอย่างก็เรียบร้อยไอคอนก็มองเห็นได้อย่างสมบูรณ์ข้อมูลสามารถอ่านได้บนหน้าจออย่างสมบูรณ์แบบ
แต่ติดตั้งเฟิร์มแวร์ MinimOSD-Extra 2.4 R726 แล้ว แต่หน้าจอเริ่มแสดงความอับอายบางอย่าง

ภาพไม่สามารถอ่านได้ ข้อมูลปะปนกันทั่วทั้งหน้าจอ

ฉันดาวน์โหลดเวอร์ชันก่อนหน้า 2.2.

ด้วยเฟิร์มแวร์เวอร์ชันนี้ ข้อมูลเริ่มแสดงโดยไม่มีการบิดเบือน

ข้อสรุป
อุปกรณ์ขนาดกะทัดรัดและราคาไม่แพง ค่อนข้างเป็นสากล ใช้ทั้งกับบอร์ด ArduPilot Mega (APM) ดั้งเดิมและโคลน HKPILOT Mega, ArduFlyer รวมถึงคอนโทรลเลอร์ซีรีส์ AIO (All-In-One) พร้อมเฟิร์มแวร์ MPNG หรือ MultyWii มีข้อมูลเกี่ยวกับการเชื่อมต่อกับคอนโทรลเลอร์ DJI Naza ในฟอรัม แต่ต้องใช้หัวแร้งในมือ
ข้อเสียอย่างเดียวคือขั้วต่อหกพินบนบอร์ดซึ่งเราเชื่อมต่อสายเคเบิลด้วยขั้วต่อสี่พิน อาจมีหลากหลายรูปแบบ หากคุณทำผิดพลาด คุณสามารถเผากระดานได้ เนื่องจากไม่มีการป้องกัน
คุณต้องอย่าลืมจ่ายไฟให้กับส่วนดิจิทัลและแอนะล็อกของบอร์ด ไม่เช่นนั้นจะไม่ทำงาน โภชนาการแบบไหนให้เลือกว่าจะสะดวกกว่าสำหรับทุกคน
แน่นอนว่าฉันชอบ MinimOSD-Extra มากกว่า เนื่องจากมันช่วยให้คุณทำการตั้งค่าเพิ่มเติมที่ไม่มีใน ArduCam OSD Config แต่เมื่อปรากฏออกมา เรายังต้องหาเวอร์ชันที่เสถียรอยู่ ฉันพบว่าเฟิร์มแวร์บางตัวส่งผลให้ข้อมูลในวิดีโอหยุดชะงัก นี่ไม่ใช่ครั้งแรกที่ฉันสามารถค้นหาเวอร์ชันที่ใช้งานได้ ดังนั้นตัวเลือก MinimOSD-Extra บางตัวจึงยังไม่พร้อมใช้งานสำหรับฉัน น่าเสียดายที่นี่เป็นข้อเสียของโครงการโอเพ่นซอร์สหลายโครงการ
ดังนั้นจึงเป็นที่น่าสังเกตว่าการกำหนดค่า ArduCam-OSD มีเสถียรภาพและผ่านการพิสูจน์แล้วมากกว่า
คอนโทรลเลอร์ทำการซ้อนทับข้อมูลคุณภาพสูงบนวิดีโอ ข้อความดูค่อนข้างชัดเจนและอ่านง่ายบนหน้าจอขนาดเล็ก ฉันไม่สังเกตเห็นการชะลอตัวใด ๆ ในการแสดงข้อมูล
Betaflight OSD (ข้อมูลบนหน้าจอ) รวมข้อมูลจากเซ็นเซอร์ต่างๆ ลงในสตรีมวิดีโอผ่านตัวควบคุมการบิน โดยทั่วไป OSD จะเป็นบอร์ดที่ติดตั้งเพิ่มเติมหรือชิปที่รวมไว้ในตัวควบคุมการบินแล้ว OSD ส่งข้อมูล เช่น แรงดันแบตเตอรี่ ขอบฟ้า ความสูง และอื่นๆ อีกมากมายไปยังหน้าจอหมวกกันน็อคหรือแว่นตา
คุณยังสามารถใช้เมนู OSD เพื่อเปลี่ยน PID ตัวกรอง และการตั้งค่าอื่นๆ ของ quadcopter ในบทความนี้ ฉันจะบอกคุณว่า Betaflight OSD คืออะไร ทำงานอย่างไร และจะตั้งค่าอย่างไร
Betaflight OSD กับ MinimOSD (MWOSD)
Betaflight OSD นั้นง่ายกว่าและดีกว่า MinimOSD:
- อันแรกเป็นชิปที่รวมเข้ากับตัวควบคุมการบินแล้วโดยไม่จำเป็นต้องบัดกรีหรือเชื่อมต่ออะไรเลย ในขณะที่ MinimOSD เป็นบอร์ดแยกต่างหากที่คุณต้องบัดกรีส่วนประกอบทั้งหมดของ quadcopter เช่นพีซี กล้อง เครื่องส่งสัญญาณวิดีโอ และอื่นๆ ขึ้นอยู่กับเซ็นเซอร์ที่คุณจะใช้อีกครั้ง นอกจากนี้ คุณต้องมีโปรแกรมเมอร์เพื่อแฟลชโมดูลนี้ผ่านคอมพิวเตอร์ของคุณ
- ประโยชน์ของ Betaflight OSD: ติดตั้งง่ายเนื่องจากทุกอย่างรวมเข้าด้วยกันแล้ว การตั้งค่าเกิดขึ้นใน Betaflight GUI ไม่จำเป็นต้องบัดกรีหรือแฟลชอะไรเลย ไม่จำเป็นต้องมีโปรแกรมเมอร์หรือเฟิร์มแวร์โมดูลของบุคคลที่สาม
- Betaflight OSD ไม่ได้ใช้พอร์ต UART เนื่องจากโดยปกติจะเชื่อมต่อกับ SPI BUS
แม้ว่าตอนนี้ MinimOSD จะได้รับการพัฒนาค่อนข้างดีอยู่แล้วและยังมีเปลือกกราฟิกและคุณสมบัติที่คล้ายกันอีกด้วย
ตัวควบคุมการบินใดที่รองรับ Betaflight OSD
ตัวควบคุมการบินบางรุ่นที่รองรับ OSD ในตัวจะรองรับ Betaflight OSD; บางตัวต้องใช้ซอฟต์แวร์เพิ่มเติมเพื่อกำหนดค่า OSD
ปัจจุบัน Betaflight OSD ได้รับการสนับสนุนโดยเครื่องบินต่อไปนี้: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 และ Betaflight F3
การตั้งค่า Betaflight OSD
ขั้นแรก ตรวจสอบให้แน่ใจว่าคุณมีเฟิร์มแวร์ตัวควบคุมการบินล่าสุด เนื่องจาก OSD รองรับในเฟิร์มแวร์ Betaflight V3.1 และใหม่กว่า
หากอุปกรณ์การบินของคุณมีชิป OSD ในตัวอยู่แล้ว เพียงเชื่อมต่อกล้องและตัวส่งสัญญาณวิดีโอเข้ากับพอร์ตที่เหมาะสม
ด้านล่างนี้เป็นตัวอย่างวิธีเชื่อมต่อกล้องและตัวส่งสัญญาณเข้ากับตัวควบคุมการบิน DYS F4 Pro FC กล้องจะเชื่อมต่อกับ "Vin" และตัวส่งสัญญาณกับ "Vout":
ตอนนี้เชื่อมต่อกับ Betaflight Configurator แล้วไปที่ การกำหนดค่าและเปิดเครื่อง OSD:
หลังจากนั้น ไปที่แท็บ OSD เพื่อเริ่มการตั้งค่า:
อะไรจะง่ายกว่าอินเทอร์เฟซนี้? เพียงเปิดและปิดข้อมูลที่คุณต้องการแสดง
รูปแบบวิดีโอ - เลือก PAL หรือ NTSC ขึ้นอยู่กับโหมดที่กล้อง FPV ของคุณอยู่ใน หากคุณไม่ทราบว่ากล้องทำงานในโหมดใด ให้ตั้งค่าเป็น AUTO โปรแกรมจะเลือกรูปแบบที่ต้องการให้กล้องทำงานเอง
ข้อมูลสำคัญ: หากหน้าจอแสดงตัวอย่างอยู่ในโหมด PAL หรือ AUTO และกล้องของคุณอยู่ใน NTSC ข้อมูลที่แสดงที่ด้านล่างของหน้าจอจะถูกตัดออก นี่เป็นคุณสมบัติของรูปแบบนี้ โดยมีกรอบที่สั้นกว่า เมื่อใช้รูปแบบ AUTO ควรวางข้อมูลที่คุณต้องการไว้ตรงกลางหน้าจอจะดีกว่า
ในบล็อก "นาฬิกาปลุก" คุณสามารถกำหนดค่า RSSI ความจุของแบตเตอรี่ เวลาก่อนการบิน (นาฬิกาจับเวลา) และระดับความสูงได้ ทันทีที่ข้อมูลเริ่มตรงกับตัวเลขเหล่านี้ ก็จะเริ่มกะพริบบนหน้าจอหมวกกันน็อคหรือแว่นตา
ในหน้าต่างแสดงตัวอย่าง คุณสามารถลากข้อมูลที่แสดงได้ตามต้องการ แต่อย่าวางไว้ใกล้กับขอบมากเกินไป เพราะอาจถูกตัดออกในภายหลัง
- จอแสดงผลแรงดันไฟฟ้าแบตเตอรี่
- เวลาเที่ยวบิน (นาฬิกาจับเวลา)
- ชื่อ (ของตัวเอง))
- ค่าก๊าซ
- โดรนกินกระแสไฟเท่าไหร่?
- ความจุแบตเตอรี่ mAh ถูกใช้ไปเท่าใด?
หากต้องการเปิดใช้งานเมนู OSD ในแว่นตาหรือหมวกกันน็อค คุณต้องใช้การเคลื่อนไหวร่วมกันโดยใช้แท่งบนรีโมทคอนโทรล:
- ก๊าซที่อยู่ตรงกลาง
- หันเห (หันเห, บิดแกน) ไปทางซ้าย
- ระดับเสียง (ระดับเสียงเอียง) ไปข้างหน้า
แก๊สต้องอยู่ตรงกลางตลอดเวลาระหว่างจูน!
หากต้องการเลื่อนดูเมนู ให้ใช้ ไม้ขวาบนรีโมทคอนโทรล หากต้องการเลื่อน - เลื่อนขึ้นหรือลง เพื่อเลือกรายการเมนู - เลื่อนไปทางซ้าย/ขวา
ที่นี่คุณสามารถเปลี่ยน PID, ตัวกรอง, โปรไฟล์ และอื่นๆ ได้ การตั้งค่าเหล่านี้ส่วนใหญ่จะอธิบายได้ในตัวหากคุณได้ทำการตั้งค่าใน Betaflight ผ่านแท็บ GUI ของ OSD แล้ว แต่ยังไม่มีรายการทั้งหมดที่นี่ บางรายการมีเฉพาะในตัวกำหนดค่าเท่านั้น หลังจากตั้งค่าแล้วให้ไปที่เมนูหลักแล้วคลิก " บันทึก*รีบูต«.
วิธีเปลี่ยนแบบอักษรใน Betaflight OSD
หากคุณไม่ชอบแบบอักษรที่แสดงบนหน้าจอ คุณสามารถเปลี่ยนได้อย่างง่ายดายใน Betaflight Configurator โดยไปที่แท็บ OSD และจะมีปุ่มตัวจัดการแบบอักษรที่ด้านล่าง:
หลังจากเลือกแบบอักษรใหม่แล้ว แบบอักษรเริ่มต้นจะยังคงแสดงในหน้าต่างแสดงตัวอย่าง แต่คุณจะมีแบบอักษรที่คุณเลือกไว้ในแว่นตาและหมวกกันน็อค ดังนั้นอย่ากังวล
คำถามที่พบบ่อย
เหตุใดฉันจึงไม่เห็นข้อมูลจาก OSD ในหมวกกันน็อคของฉัน
ตรวจสอบว่าคุณได้ระบุรูปแบบวิดีโอ PAL หรือ NTSC ที่ถูกต้องหรือไม่ ลองสลับดู หากยังคงใช้งานไม่ได้ ให้ตรวจสอบสายไฟและข้อต่อบัดกรีจากกล้องและตัวส่งสัญญาณไปยังโมดูล OSD
ฉันจะเปลี่ยนชื่อของฉันได้อย่างไร?
ใน Betaflight แท็บการกำหนดค่า เลื่อนลง จะมีช่องข้อความ "ชื่องานฝีมือ" คุณสามารถป้อนชื่ออื่นได้
























