Это небольшой рассказ о том, как построить робота в виде игрушечного автомобильчика с видео камерой, которым можно управлять с помощью компьютера или смартфона на ОС Android через WiFi. Устройство не имеет никакой автономности в смысле своего поведения (типа распознавания чего-либо), управление - только от человека, поэтому «робот» - это не совсем подходящее слово в названии.
Началось все с того, что идея управления игрушечными устройствами от первого лица (т.н. FPV) мне показалась чрезвычайно интересной с точки зрения собственно процесса. Ведь мы можем таким образом реализовать свое присутствие, не в виртуальном мире, а в реальном.
Проще и быстрее всего применить эту идею на игрушечных или модельных автомобилях. Текущие технологии должны давать такую возможность промышленности и предложить массу подобных вещей. Однако это предложение оказалось достаточно дорогим по сравнению тем что можно сделать самому.
Так как это мой первый проект, я ни программировать, ни даже паять нормально не умел, и я решил сначала поискать в интернете единомышленников и их варианты решения данной задачи.
Начав изучение вариантов, как можно осуществить эту идею, я нашел очень подробное описание подобного проекта
. A его автор с радостью помог мне разобраться в проблемах, возникших при создании робота.
Так я впервые и узнал что такое …duino. Так как это был уже готовый вариант микроконтроллера, где не нужно было паять обвязку к нему, я выбрал именно его. Также очень понравилось присутствие бутлоадера, позволяющего прошивать микроконтроллер без программаторов.
Для реализации данного проекта понадобится:
- Микроконтроллер Arduino (любой: nano, uno, mega)
- Аккумулятор 9,6вольт
- Китайская машинка на радиоуправлении
- Роутер dir320 (или любой другой поддерживающий OPEN-WRT прошивку)
- Вебкамера Logitech c310 или любая другая с UVC потоком
Программ пять: на PC, на Android, на роутере (сервер управления и видеопоток), и в микропроцессоре.
Схема работы: соединяем настольный компьютер (ноутбук, далее - PC) с роутером по WiFi. На роутере при его включении автоматически загружаются 2е программы:
1) сервер. Эта программа открывает сокет (соединение) на определенном порту и ждет, когда по этому порту с ней соединится клиент (любая программа, которая обратится в этот порт и также, особым образом скажет серверу, что она готова работать через открытый сокет). Далее, после установки соединения, все что придет от клиента, будет перенаправлено по определенному пути, для нас это COM-порт, на этом порту подключен микропроцессор. И наоборот, все что придет со стороны COM-порта, будет переслано клиенту.
2) программа обработки видео, захватывает его с usb камеры и шлет на определенный порт. Для его просмотра нужно всего лишь иметь соединение с роутером на этом порту.
После того, как между компьютером и роутером установлено WiFi-соединение, запускаем на PC программу для управления роботом (тот самый клиент), эта программа соединяется с программой-сервером на роутере. Эта же или другая программа транслирует видео с WiFi роутера.
Далее, пользователь может управлять автомобильчиком и нажимает, например, кнопку «вперед». Программа на PC, отсылает команду «вперед» прямо на роутер, на его IP, но на определенный порт. На роутере, эта команда поступает в программу-сервер, т.к. выслана она на его порт, и в рамках открытого для этого сокета. Программа-сервер, ничего не делая с этой командой, просто отправляет её в COM-порт. Таким образом, команда «вперед» оказывается в микропроцессоре, который в ответ на нее, дает сигнал «вперед» на один из своих выводов. К таким выводам процессора подсоединена схема управления двигателями, т.к. сам микропроцессор управлять ими не может в силу своей маломощности.
Управлять исполнительным устройством через роутер, без микропроцессора не получится, т.к. микропроцессор может формировать сигналы «1» (напряжение >2,5v) или «0» (меньше обозначенного) на любом из десятка-другого своих выводов. У роутера же выводов нет, есть только порты ввода/вывода, типа USB или COM (serial), в которых по 2-3 провода.
Теперь часть практическая. Заранее скажу, что несмотря на кажущиеся сложности, все на самом деле просто, если речь идет о простом копировании этого проекта – ведь все уже сделано и работает. Нужно просто выполнить в точности эту инструкцию.
Изначально микроконтроллером был freeduino maxserial у которого был com port, который был одним из немногих(как я тогда считал) для подключения к uart роутеру, для этого нужно было паять переходник с uarta на com чтобы соединить его с роутером. Его брать я не очень хотел, так как оригиналом есть все-таки Arduino, да и Freeduino в Украине нет.

Как я выяснил потом, все было это просто излишнее нагромождение схемы. Обойтись можно всего 1 проводком который будет идти от TX роутера(на рисунке) к RX (0 пин) микроконтроллера.
Непонятно почему но на фридуине оказалось для нормального подключения нужно tx на tx. Скорее всего просто неверно нанесено обозначение. (тут 0 пин tx) По этому лучше брать оригинальный
.
Машинку я купил хорошую, хоть и китайскую

Машинка оказалась очень мощная, 5 кг на ровной поверхности тянула очень уверено. Также у нее в комплекте шел аккумулятор на 6 вольт. Что касается электроники, то в машинке уже есть готовый драйвер двигателей, на который можно подать управляющие слаботочные выходы с микроконтроллера (если бы с машинкой не повезло - драйвер моторов можно было взять тоже от arduino)
Роутер требует прошивку openwrt и список пакетов указанных на рисунке.

Роутер можно настроить как точку доступа, которой могут подключится любые устройства, имеющие WiFi. И, даже если не будет программного обеспечения для управлении машинкой – использовать ее как беспроводную камеру видеонаблюдения.
Камера с310 просто подключается к порту usb на роутер и не требует пайки, требует небольших настроек в роутере. Проект имеет 2 цепи питания, 1 цепь питается от 9,6 вольт - роутер и микроконтроллер, 2 цепь питается от 6 вольт - привод и рулевое машинки. Можно обойтись всего 1 источником питания в 9,6 вольт, но более емкостным. Роутер потребляет 2А, микроконтроллер потребляет почти незаметно, машинка 4А.
Программа микроконтроллера обрабатывает сообщения, которые приходят с последовательного порта роутера, обработка происходит побайтово через portb arduino, например если пришло в роутер 2, то, переведя в двоичную систему получаем 00000010 – что соответствует 2 пину на portb. Такое решение позволяет управлять одновременно несколькими пинами. Вот что получилось в итоге:

Приложение для андроид:

Приложение для пк:

Данный проект еще не закончен и продолжает совершенствоваться.
В планах использовать arduino mega, роутер mr3020, вебакамеру оставить как есть(возможно добавить сферическую линзу для большего обзора), задействовать шим для плавного и точного управления, использовать сервопривод для поворотов, добавить дальномер. Добавить видео на Android.
- полный каталог плат
В этой статье вы узнаете, как создать систему, которая может включать и выключать нагрузки постоянного тока с помощью мобильного приложения. Вы также узнаете, как выполнить эту задачу мгновенно или по таймерам, заранее установленным для включения и выключения нагрузок.
Обзор проекта
Вы можете реализовать эту систему там, где вам нужно включать нагрузку постоянного тока на определенное время. В этом вам поможет наше Android приложение, не требуя аппаратного интерфейса, клавиатуры и LCD дисплея.
Комплектующие
Сборка макетной платы ESP8266
ESP8266 - недорогой SoC-чип со встроенным микроконтроллером и полным стеком протоколов TCP/IP, что означает, что он может напрямую обращаться к вашей Wi-Fi сети.
Поскольку у этого чипа есть свой микроконтроллер, вы можете поместить в него код своего приложения или можете использовать модуль просто как Wi-Fi приемопередатчик, что мы и собираемся сделать в данном проекте. Более эффективно было бы использовать этот модуль и как приемопередатчик, и как контроллер, но в целях обучения мы будем взаимодействовать с модулем, используя Arduino.
Чип ESP8266 поставляется в разных модулях. Мы будем использовать модуль ESP-01. Конечно, вы можете использовать любой другой модуль.
Во-первых, вы должны знать, что модуль работает с напряжением 3,3 В, и напряжение высокого логического уровня от Arduino должно быть таким же, чтобы не повредить наш модуль. Для этого требуется преобразователь уровня напряжения между платой Arduino (которая работает на 5 В) и модулем. Хорошей новостью является то, что в преобразователе будет нуждаться только вывод для передачи на Arduino, поскольку приемный вывод обычно распознает логические сигналы с напряжением 3,3 В от ESP8266.
Одним из простейших способов выполнения этого преобразования является схема от Sparkfun. Вы можете заказать готовый модуль .
Преобразователь уровня 5В → 3,3В
На рисунке ниже показана распиновка нашего модуля на ESP8266:
| Вывод | Назначение |
|---|---|
| UTXD | Передача данных через UART |
| URXD | Прием данных через UART. Выход, к которому он подключается, должен быть 3,3 В. |
| CH_PD | Выключение: низкий уровень на входе выключает чип, высокий уровень на входе включает его; для нормальной работы модуля необходимо подтянуть его к линии питания. |
| GPIO0 | При загрузке: должен быть высокий уровень, чтобы входить в нормальный режим загрузки; низкий уровень вводит в специальные режимы загрузки. |
| GPIO2 | При загрузке: низкий уровень заставляет загрузчик войти в режим загрузки флеш-памяти; высокий уровень вызывает нормальный режим загрузки. |
| RST | Сброс; активный уровень - низкий. |
| GND | Земля. |
| VCC | Питание/3,3В. |
Я использовал LM317, настраиваемый линейный регулятор напряжения с выходным током до 1,5 А, для обеспечения модуля подходящим источником питания 3,3 В.
Примечание: Не используйте вывод 3,3 В от Arduino, так как стабилизатор напряжения 3,3 В на плате Arduino не может обеспечить необходимую для модуля величину тока, особенно при пиковом потреблении энергии во время передачи.
Я использовал BS170 (вместо BSS138) для преобразователя логических уровней; оба работают хорошо.
Теперь вы можете подключить свой модуль к компьютеру, используя USB-TTL преобразователь, и испытать его.
Сборка макетной платы реле
Для управления реле я использовал биполярный NPN транзистор BC337 с резистором 1 кОм на базе. Для защиты от обратного напряжения катушки я использовал диод 1n4007.
Нормально замкнутый (NC) контакт реле я решил подключить к земле.
Код Arduino
Теперь мы сталкиваемся с проблемой. ESP8266 использует UART в качестве интерфейса для AT-команд, а Arduino Uno (которая использует Atmega328) имеет только один порт UART. Этот порт уже подключен к мосту USB-TTL, а также к выводам 0 и 1.
В качестве решения вы можете использовать эмулятор для UART порта на другом цифровом выводе Arduino с помощью библиотек AltSoftSerial или SoftwareSerial. Это позволит вам по-прежнему иметь аппаратный порт UART для отладки и печати сообщений в консоли, а программный порт - для связи с модулем.
Многие люди (включая меня) сообщают о проблемах с программным последовательным портом при высоких скоростях передачи - как на тех, что мы будем использовать с esp8266, 115200 бит/с. Я могу сказать, что у вас 50% принятых от модуля данных будет повреждено, если вы используете программный UART, а из переданных от Arduino к модулю данных почти 100% будет корректно. Я получил эти результаты после отслеживания сигналов на линиях RX и TX.
В качестве решения я добавил в код несколько директив define , чтобы облегчить вам выбор между аппаратным и программным UART портами. Имейте в виду, что вы не можете использовать один и тот же порт для отладки и общения с модулем, поэтому вам нужно выбирать между ними.
//раскомментируйте Serial.*** , если хотите для связи с ESP использовать аппаратный последовательный порт (выводы 0,1) //раскомментируйте esp8266.*** , если хотите для связи с ESP использовать программный последовательный порт (выводы 2,3) #define esp8266_Available() Serial.available() //esp8266.available() #define esp8266_Find(ARG) Serial.find(ARG) //esp8266.find(ARG) #define esp8266_Read() Serial.read() //esp8266.read() #define esp8266_Write(ARG1,ARG2) Serial.write(ARG1,ARG2) //esp8266.write(ARG1,ARG2) #define esp8266_Print(ARG) Serial.print(ARG) //esp8266.print(ARG)
В исходнике вы найдете часть кода, которая устанавливает модуля с вашим роутером:
SendCommand("AT+RST\r\n", 2000, DEBUG); // перезапустить модуль sendCommand("AT+CWMODE=1\r\n", 1000, DEBUG); // настроить как точку доступа sendCommand("AT+CWJAP=\"tur\",\"341983#tur\"\r\n", 3000, DEBUG); //**** ИЗМЕНИТЬ SSID и ПАРОЛЬ В СООТВЕТСТВИИ С ВАШЕЙ СЕТЬЮ ******// delay(10000); sendCommand("AT+CIFSR\r\n", 1000, DEBUG); // получить ip адрес sendCommand("AT+CIPMUX=1\r\n", 1000, DEBUG); // настроить для нескольких соединений sendCommand("AT+CIPSERVER=1,1337\r\n", 1000, DEBUG); // включить сервер на порту 1337
Цикл скетча ожидает команды, которые должны прийти через Wi-Fi соединение. В настоящее время поддерживаются следующие команды:
- ‘con’ для получения состояния выводов, высокий или низкий логический уровень;
- ‘on=’ включить соответствующий вывод;
- ‘of=’ выключить соответствующий вывод;
- ‘Tm=n/fS’ установить таймер включения (n) или выключения (f) соответствующего вывода.
Все команды имеют отклик подтверждения.
Примечания:
- некоторые части скетча основаны на ;
- если вы используете модули со старым SDK, у вас могут быть такие же ошибки, как и у меня. Единственным решением в этом случае является обновление вашей прошивки до последней версии. Посмотрите , для получения помощи в обновлении прошивки модуля на ESP8266. Я обновил прошивку с версии 1.3 до 1.5.4.
Полный код программы:
#include
Android приложение
Чтобы управлять всеми выше перечисленными аппаратными компонентами, мы будем использовать простое приложение для Android. Это приложение позволит нам включать или выключать выход напрямую или через определенный период времени.
Примечание: Приложение требует Android 4.0 (IceCreamSandwich) или выше.
- Прежде всего, вы должны знать IP адрес своего модуля. Если вы использовали программный последовательный порт, IP адрес будет напечатан в консоли. Если вы использовали аппаратный последовательный порт, то вы должны использовать кабель для отслеживания данных на линиях RX и TX, чтобы увидеть IP адрес. Вам также нужно знать номер порта, который был указан в скетче для Arduino. После этого нажмите "connect", чтобы получить состояние всех трех выходов. Вам нужно убедиться, что ваш Wi-Fi роутер включен, и вы подключены к локальной сети.
- Теперь нажмите на любой переключатель, который вы хотите включить/выключить. Всякий раз, когда захотите, вы можете нажать "refresh", чтобы обновить состояние всех выходов.
- На вкладке "Timers" вы можете установить любой из этих трех выходов для включения/выключения через определенный промежуток времени (от 0 до 24 часов).
- После любого действия вы получите сообщение с подтверждением о том, выполнилась ли команда успешно, или возникла какая-то ошибка.
Демонстрационное видео
Вот и всё! Надеюсь, статья оказалась полезной. Оставляйте комментарии!
RC машинка может быть WiFi машинкой...?
RC машинка это хорошо, но дешевые RC машинки имеют ограниченный диапазон и управляются только определённым пультом поставляемым в комплекте.
Я купил RC джип 4х4 с гибкой подвеской и внедорожными шинами примерно за 30 долларов. Поигравшись с машинкой я решил, что её можно улучшить при помощи Wi-Fi и Android. Потратив немного времени, я полностью удалил плату из машинки. Я замерял напряжения на этой плате и разработал систему управления двигателем при помощи Arduino. Оригинальная система управления не использует ШИМ для контроля скорости. Машинка рассчитана на переезд через препятствия на очень низкой передаче, и как следствие очень медленно. В моей же схеме используется ШИМ.
Я использую Arduino уже несколько месяцев. Я также приобрел asynclabs WiFi Sheild для Duemilanoe Arduino, чтобы экспериментировать с WiFI. Он поставляется с библиотекой, устанавливаемой в Arduino IDE. Я смог сделать программу, которая позволяет управлять двигателями и направлением движения при помощи WiFi.
При помощи Visual Studio я разработал окно программы, которая подключается к серверу автомобиля и дает ему команды. Затем после нескольких попыток я написал приложение для Android, которое использует акселерометр для управления машинкой.
Инструменты и элементы
Это общий список инструментов и элементов, которые использовались в этом проекте. В документации Eagle указаны точные технические характеристики используемых компонентов.

Мультиметр
Паяльник
Припой
Отвертки
Раствор для травления плат
Фольгированый стеклотекстолит
Плоскогубцы
Arduino
AsyncLabs WiFi Sheild
Разъёмы RJ45
Драйвер двигателя с H-мостом
Конденсаторы

Драйвер двигателей

Используя Eagle, я разработал эту схему и сделал печатную плату для неё. Она функционирует как драйвер двигателей и регулятор их мощности для Arduino.
Это позволяет использовать стандартный 7.2В аккумулятор для питания основных и рулевых двигателей и Arduino.
В этой схеме используется двойной интегральный драйвер с Н-мостом SN754410 для управления двигателями. Выводы управления драйвера подсоединены к кабелю RJ45, который подключается к AsyncLabs WiFi Sheild.
Arduino Shield

Используя библиотеку SparkFun в Eagle я разработал Arduino Shield, через который будут проходить контакты с WiFi Shield и подключаться к драйверу двигателя через разъем RJ45 и 2 винтовые клеммы.
Цоколевка контактов RJ45 очень важна. Ошибка в подключении может привести к непредсказуемым результатам и придётся переделывать плату.
Травление печатных плат
Эта тема была раскрыта много раз, и я не буду подробно описывать её.
Я использую , и он меня устраивает, а с опытом дает прекрасные результаты.
Для крепления платы к корпусу использовались липучки. Мне повезло, т.к. в моей машинке было много места для электроники под трубчатым каркасом.
Я забыл сфотографировать соединение платы драйвера двигателя с остальными платами, однако он хорошо стал и не занял много места в корпусе.

Программа
Мой код может быть не достаточно эффективен, но он работает.
Машинка
Мне удалось собрать CarServer на основе примера SocketServer, который я получил вместе с Wifi Sheild AsynLabs.
Вам необходимо будет ввести информацию о своей беспроводной сети в код Arduino. Когда машина включилась, дайте ей 15-45 секунд, чтобы установить соединение с маршрутизатором. Красный светодиод на WiFi Shield означает, что соединение установлено.
Я сделал эту программу при помощи C # и MS Visual Studio 2008. Я сделал хорошее окно, и автомобилем можно управлять стрелочками.

Почему бы не управлять машинкой с телефона?
Такая мысль появилась у меня примерно через неделю после покупки DroidX. Я начал экспериментировать и в конечном итоге использовал Android SDK. Я нашел аналогичные приложения, где для управления используется акселерометр. Смотря на эти приложения написал свое.
Вставить IP и порт, указанные в коде Arduino. Держите телефон горизонтально. Затем наклоните его от себя, чтобы ехать вперед и на себя, чтобы ехать назад. Используйте телефон как руль.
Это мое первое крупное приложение для Android. В нем до сих пор есть некоторые ошибки, но в основном оно работает нормально.
Рулите во дворе машинкой 4x4 с WiFi!
Я отлично провел время, создавая этот проект. Я получил много знаний и новых навыков, и теперь у меня есть машинка 4х4, которой можно управлять с телефона.
Мне нужна камера для установки за лобовым стеклом, чтобы смотреть куда ехать. Она должна быть с низким энергопотреблением, а также передавать видео сама по себе. (Я думаю, что Arduino справится с этим).

Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Драйвер двигателей | |||||||
| IC1 | Микросхема | SN754410 | 1 | В блокнот | |||
| Линейный регулятор | 5 В | 1 | В блокнот | ||||
| Биполярный транзистор | 2N3904 | 1 | В блокнот | ||||
| C1, C2 | Электролитический конденсатор | 2 | В блокнот | ||||
| Разьем | 2 вывода | 7 | В блокнот | ||||
| Разьем | 8 выводов | 1 | В блокнот | ||||
| Arduino Shield | |||||||
| U1 | Плата Arduino | 1 | В блокнот | ||||
| Т1 | Биполярный транзистор | 2N3904 | 1 | В блокнот | |||
| R1 | Резистор | 1 | В блокнот | ||||
| U$3 | Подстроечный резистор | 1 | В блокнот | ||||
| Разьем | 2 вывода | 2 | |||||
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- ID метки;
- Детские игрушки;
- Mesh-сети.
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.

Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.
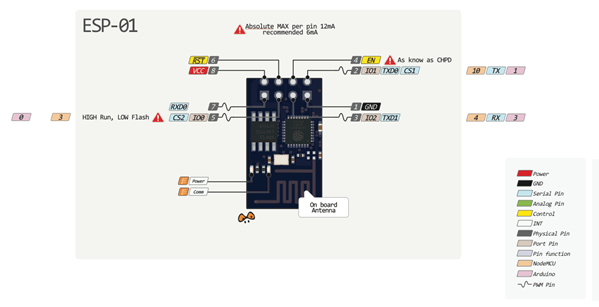

Описание контактов:
- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.
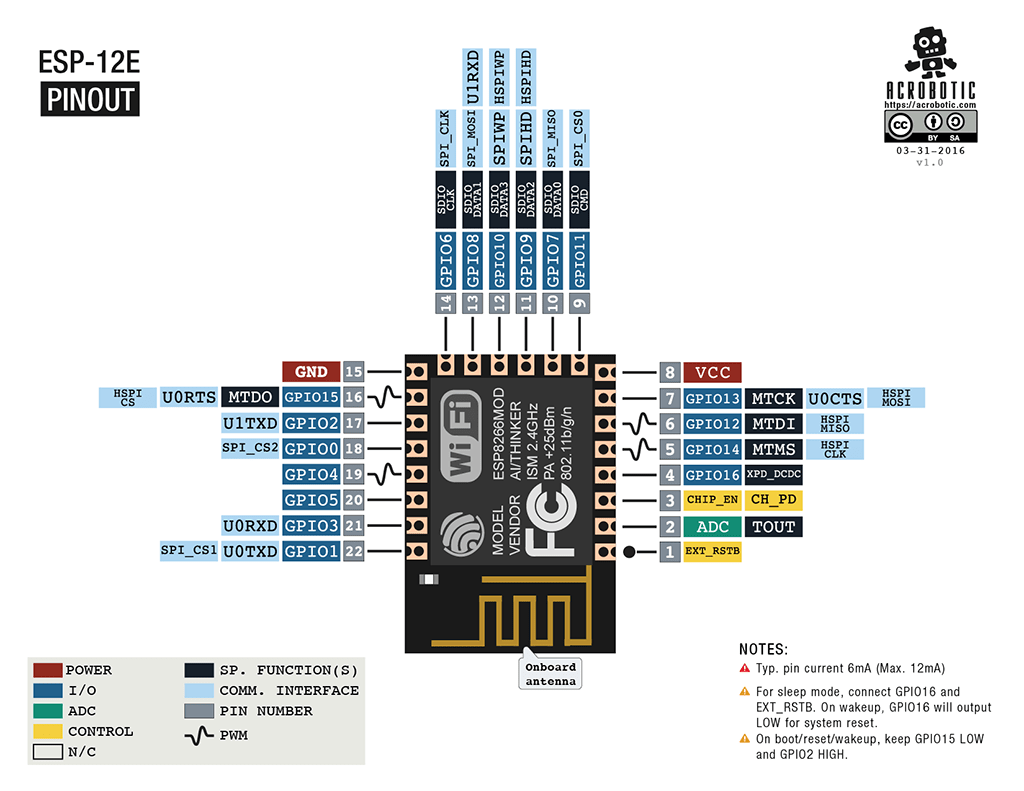
Распиновка ESP-12
Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
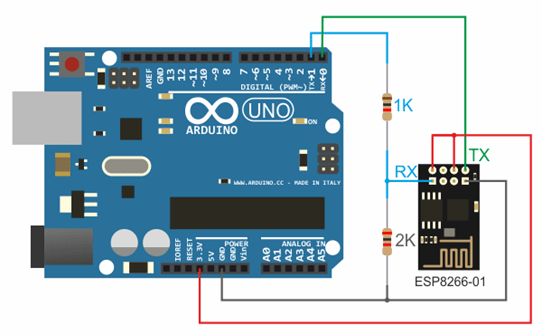
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino IDE.
- Выбрать в меню инструменты нужный порт, плату, частоту и размер flash-памяти.
- Файл - Примеры - ESP8266WiFi - WiFiWebServer.
- Записать в скетче SSID и пароль сети Wi-Fi.
- Начать компиляцию и загрузку кода.
- Дождаться окончания процесса прошивки, отсоединить GPIO0 от земли.
- Поставить скорость 115200.
- Произойдет подключение, будет записан адрес IP.
- Открыть браузер, ввести в адресной строке номер IP/gpio/1
- Посмотреть монитор порта, если к выходу GPIO2 подключен светодиод, он должен загореться.
NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.
























