С модулем Wi-Fi.
На Arduino Uno WiFi предусмотрено всё для удобной работы с микроконтроллером: 14 цифровых входов/выходов (6 из них могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, разъём USB, разъём питания, разъём для внутрисхемного программирования (ICSP) и кнопка сброса микроконтроллера.
Изюминка платы - модуль WiFi ESP8266, который позволяет Arduino обмениваться информацией с другими модулями по беспроводным сетям стандартов 802.11 b/g/n.
ESP8266 позволяет прошивать плату Arduino без использование USB-шнура в режиме OTA (Firmware Over The Air - «микропрограммы по воздуху»).
Видеообзор платы
Подключение и настройка
Для начало работы с платой Arduino Uno WiFi в операционной системе Windows скачайте и установите на компьютер интегрированную среду разработки Arduino - Arduino IDE.
Что-то пошло не так?
Настройка модуля WiFi
Прошивка Arduino по WiFi
Arduino Uno WiFi имеет в своём запасе ещё один приятный бонус - возможность загружать скетчи без использование USB-шнура в режиме OTA (Firmware Over The Air). Рассмотрим подробнее как это сделать.

Для этого необходимо войти в меню: Инструменты Порт и выбирать нужный порт.
Так как мы прошиваем Arduino по WiFi, плата определиться как удалённое устройство с IP-адресом

Среда настроена, плата подключена. Можно переходить к загрузке скетча.
Arduino IDE содержит большой список готовых примеров, в которых можно подсмотреть решение какой-либо задачи. Выберем среди примеров мигание светодиодом - скетч «Blink». Прошейте плату нажав на иконку загрузки программы.
Прошейте плату нажав на иконку загрузки программы. После загрузки светодиод начнёт мигать раз в секунду. Это значит, что всё получилось.
После загрузки светодиод начнёт мигать раз в секунду. Это значит, что всё получилось.
Теперь можно переходить к примерам использования .
Примеры использования
Web-сервер
Поднимем простой web-сервер, который будет отображать страницу с текущими значениями аналоговых входов.
web-server.ino /* Пример простого web-сервера, работающего на Arduino Uno WiFi. Сервер показывает значения на аналоговых входах и обновляет информацию каждые две секунды. Обратитесь к серверу по адресу http://Пример вывода значений с аналоговых пинов
" ) ; client.print ("- "
)
;
for
(int
analogChannel =
0
;
analogChannel <
4
;
analogChannel++
)
{
int
sensorReading =
analogRead(analogChannel)
;
client.print
("
- на аналоговом входе " ) ; client.print (analogChannel) ; client.print (": " ) ; client.print (sensorReading) ; client.print ("" ) ; } client.println ("
Элементы платы

Микроконтроллер ATmega328P
Сердцем платформы Arduino Uno WiFi является 8-битный микроконтроллер семейства AVR - ATmega328P.
Микроконтроллер ATmega16U2
Микроконтроллер ATmega16U2 обеспечивает связь микроконтроллера ATmega328P с USB-портом компьютера. При подключении к ПК Arduino Uno WiFi определяется как виртуальный COM-порт. Прошивка микросхемы 16U2 использует стандартные драйвера USB-COM, поэтому установка внешних драйверов не требуется.
Пины питания
VIN: Напряжение от внешнего источника питания (не связано с 5 В от USB или другим стабилизированным напряжением). Через этот вывод можно как подавать внешнее питание, так и потреблять ток, если к устройству подключён внешний адаптер.
5V: На вывод поступает напряжение 5 В от стабилизатора платы. Данный стабилизатор обеспечивает питание микроконтроллера ATmega328. Запитывать устройство через вывод 5V не рекомендуется - в этом случае не используется стабилизатор напряжения, что может привести к выходу платы из строя.
3.3V: 3,3 В от стабилизатора платы. Максимальный ток вывода - 1 А.
GND: Выводы земли.
IOREF: Вывод предоставляет платам расширения информацию о рабочем напряжении микроконтроллера. В зависимости от напряжения, плата расширения может переключиться на соответствующий источник питания либо задействовать преобразователи уровней, что позволит ей работать как с 5 В, так и с 3,3 В устройствами.
Порты ввода/вывода
Цифровые входы/выходы:
пины 0 – 13
Логический уровень единицы - 5 В, нуля - 0 В. Максимальный ток выхода - 40 мА. К контактам подключены подтягивающие резисторы, которые по умолчанию выключены, но могут быть включены программно.
ШИМ:
пины 3 , 5 , 6 , 9 , 10 и 11
Позволяют выводить 8-битные аналоговые значения в виде ШИМ-сигнала.
АЦП:
пины A0 – A5
6 аналоговых входов, каждый из которых может представить аналоговое напряжение в виде 10-битного числа (1024 значений). Разрядность АЦП - 10 бит.
TWI/I²C:
пины SDA и SCL
Для общения с периферией по синхронному протоколу, через 2 провода. Для работы - используйте библиотеку Wire .
SPI:
пины 10(SS) , 11(MOSI) , 12(MISO) , 13(SCK) .
Через эти пины осуществляется связь по интерфейсу SPI. Для работы - используйте библиотеку SPI .
UART:
пины 0(RX) и 1(TX)
Эти выводы соединены с соответствующими выводами микроконтроллера ATmega16U2, выполняющей роль преобразователя USB-UART. Используется для коммуникации платы Arduino с компьютером или другими устройствами через класс Serial .
Светодиодная индикация
Разъём USB Type-B
Разъём USB Type-B предназначен для прошивки платформы Arduino Uno WiFi с помощью компьютера.
Разъём для внешнего питания
Разъём для подключения внешнего питания от 7 В до 12 В.
Регулятор напряжения 5 В
Когда плата подключена к внешнему источнику питания, напряжение проходит через стабилизатор MPM3610 . Выход стабилизатора соединён с пином 5V . Максимальный выходной ток составляет 1 А.
Регулятор напряжения 3,3 В
Стабилизатор MPM3810GQB-33 с выходом 3,3 вольта. Обеспечивает питание модуля WiFi ESP8266 и выведен на пин 3,3V . Максимальный выходной ток составляет 1 А.
ICSP-разъём для ATmega328P
ICSP-разъём предназначен для внутрисхемного программирования микроконтроллера ATmega328P. С использованием библиотеки SPI данные выводы могут осуществлять связь с платами расширения по интерфейсу SPI. Линии SPI выведены на 6-контактный разъём, а также продублированы на цифровых пинах 10(SS) , 11(MOSI) , 12(MISO) и 13(SCK) .
ICSP-разъём для ATmega16U2
ICSP-разъём предназначен для внутрисхемного программирования микроконтроллера ATmega16U2.
Хотите послать текстовое сообщение с вашего смартфона с ОС Android на свою плату Arduino? В этой статье написано, как это сделать!
Что потребуется
- смартфон на Android с поддержкой режима USB хоста (т.е. поддержка OTG) - большинство устройств, работающих с Android 3.1 и выше, поддерживают этот режим. Проверьте свой телефон с помощью USB Host Diagnostics App из Play Store;
- Arduino - любая версия. Я буду использовать Uno R3 ;
- USB кабель для Arduino;
- USB OTG кабель - он необходим вам, чтобы подключить USB кабель Arduino к порту micro-USB телефона;
- Android Studio - вам необходимо установить его. Это довольно просто сделать. Android Studio делает разработку приложений проще, благодаря своим предположениям и генерации кода. Это одна из лучших IDE. Вы также можете использовать эту статью в качестве руководства по установке Android IDE.
Основные компоненты приложения для Android
В Android приложении есть три основных файла:
MainActivity.java Здесь находится выполняемый код на Java, который управляет тем, как будет функционировать приложение. activity_main.xml Содержит макет приложения, то есть, компоненты: кнопки, компоненты отображения текста и т.д. AndroidManifest.xml Здесь вы определяете, когда приложение должно запускаться, в какие права ему нужны, и к какому аппаратному обеспечению ему необходимо получить доступ.
Еще есть множество других файлов, но все они связаны друг с другом с помощью этих трех.
Активность может быть охарактеризована, как экран, где пользователь взаимодействует с телефоном. Активности содержат такие виджеты, как кнопки, текстовые поля, изображения и т.д., которые помогают в передаче информации. Данное руководство будет использовать только одну активность, MainActivity , которая будет принимать введенный пользователем текст, чтобы отправить его на Arduino, а также отображать принятый текст.
Макет

Мы будем использовать тот же макет, что и в USB App и Bluetooth App. Он прост и содержит минимум виджетов, необходимых для проверки соединения между устройствами.
Как вы можете видеть, он содержит виджет EditText для получения данных от пользователя, кнопки для запуска соединения, передачи данных, завершения соединения и очистки TextView . Полученные данные отображаются в TextView (пустое пространство под кнопками).
Вот часть XML кода. Поскольку код для кнопок похож, здесь он не приводится. Полный код можно скачать по ссылке в конце статьи.
Я использовал здесь RelativeLayout , а это означает, что каждый виджет расположен относительно виджетов вокруг него. Макет может быть легко воссоздан на вкладке Design Tab , где вы можете перетащить виджеты туда, куда хотите. Нам необходимо описать, что будет происходить при нажатии на кнопку. Для этого используется метод onClick . Укажите имя метода в XML коде для кнопки. Для этого добавьте строку:
Android:onClick="onClickMethod"
Теперь наведите курсор мыши на эту строку, слева должно будет появиться предупреждение, похожее на это:

Нажмите на варианте «Создать onClick...». Это автоматически добавит код метода onClick в MainActivity.java . Вам необходимо выполнить это для каждой кнопки.
Библиотека USB Serial
Настройка последовательного соединения в Android довольно трудоемка, так как требует от вас ручной настройки множества вещей, поэтому я нашел несколько библиотек, которые делают всё это автоматически. Я протестировал несколько из них и, наконец, остановился на библиотеке UsbSerial от Github пользователя felHR85 . Среди подобных библиотек, что я нашел, она единственная до сих пор обновляется. Ее довольно легко настроить и использовать. Чтобы добавить библиотеку в свой проект, скачайте последнюю версию JAR файла на Github. Поместите его в подкаталог libs в каталоге вашего проекта. Затем в файловом проводнике в Android Studio кликните правой кнопкой мыши на JAR файле и выберите « Добавить как библиотеку » (Add as Library). Вот и всё!
Алгоритм выполнения программы

Это краткий план того, как мы будем действовать. Каждая активность имеет метод onCreate() , который запускается при создании активности. Какой бы код вы ни хотели запустить в начале, он должен быть помещен внутрь этого метода. Обратите внимание, что чтение из устройства является асинхронным, то есть оно будет работать в фоновом режиме. Это делается для того, чтобы данные были получены как можно скорее.
Открытие соединения
Во-первых, давайте определим метод onClick для кнопки Begin . При нажатии необходимо выполнить поиск всех подключенных устройств, а затем проверить, совпадает ли VendorID подключенного устройства (ID поставщика) с VendorID Arduino. Если совпадение найдено, то у пользователя должно быть запрошено разрешение. Каждое ведомое USB устройство имеет ID поставщика (Vendor ID) и ID продукта (Product ID), которые могут быть использованы для определения того, какие драйвера должны использоваться для этого устройства. Vendor ID для любой платы Arduino равен 0x2341 или 9025.
Public void onClickStart(View view) { HashMap usbDevices = usbManager.getDeviceList(); if (!usbDevices.isEmpty()) { boolean keep = true; for (Map.Entry entry: usbDevices.entrySet()) { device = entry.getValue(); int deviceVID = device.getVendorId(); if (deviceVID == 0x2341) //Arduino Vendor ID { PendingIntent pi = PendingIntent.getBroadcast(this, 0, new Intent(ACTION_USB_PERMISSION), 0); usbManager.requestPermission(device, pi); keep = false; } else { connection = null; device = null; } if (!keep) break; } } }
Теперь давайте определим BroadcastReceiver для приема широковещательных сообщений, чтобы запросить у пользователя разрешения, а также для автоматического запуска соединения, когда устройство подключено, и закрытия соединения, когда оно отключено.
// Приемник широковещательных сообщений для автоматического запуска и закрытия последовательного соединения. private final BroadcastReceiver broadcastReceiver = new BroadcastReceiver() { @Override public void onReceive(Context context, Intent intent) { if (intent.getAction().equals(ACTION_USB_PERMISSION)) { boolean granted = intent.getExtras().getBoolean(UsbManager.EXTRA_PERMISSION_GRANTED); if (granted) { connection = usbManager.openDevice(device); serialPort = UsbSerialDevice.createUsbSerialDevice(device, connection); if (serialPort != null) { if (serialPort.open()) { //Установить параметры последовательного соедниения. setUiEnabled(true); //Включить кнопки в UI. serialPort.setBaudRate(9600); serialPort.setDataBits(UsbSerialInterface.DATA_BITS_8); serialPort.setStopBits(UsbSerialInterface.STOP_BITS_1); serialPort.setParity(UsbSerialInterface.PARITY_NONE); serialPort.setFlowControl(UsbSerialInterface.FLOW_CONTROL_OFF); serialPort.read(mCallback); // tvAppend(textView,"Serial Connection Opened!\n"); } else { Log.d("SERIAL", "PORT NOT OPEN"); } } else { Log.d("SERIAL", "PORT IS NULL"); } } else { Log.d("SERIAL", "PERM NOT GRANTED"); } } else if (intent.getAction().equals(UsbManager.ACTION_USB_DEVICE_ATTACHED)) { onClickStart(startButton); } else if (intent.getAction().equals(UsbManager.ACTION_USB_DEVICE_DETACHED)) { onClickStop(stopButton); } }; };
Если первое условие IF выполняется, и если пользователь дал разрешение, то начать соединение с устройством, у которого Vendor ID совпадает с необходимым нам Vendor ID. Кроме того, если принято широковещательное сообщение о подключении или отключении устройства, вручную вызывать методы onClick для кнопок Start и Stop . SerialPort определяется с использованием устройства и соединения в качестве аргументов. В случае успеха открыть SerialPort и установить соответствующие параметры. Значения параметров для Arduino Uno равны: 8 бит данных, 1 стоповый бит, бита четности нет, управление потоком выключено. Скорость передачи данных может быть 300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600 или 115200 бит/с, но мы будем использовать стандартные 9600 бит/с.
Прием данных от устройства
Во фрагменте кода выше обратите внимание на строку, содержащую serialPort.read(mCallback) . Здесь функции read передается ссылка на объект Callback , который будет автоматически срабатывать при обнаружении входящих данных.
UsbSerialInterface.UsbReadCallback mCallback = new UsbSerialInterface.UsbReadCallback() { // Определение метода обратного вызова, который вызывается при приеме данных. @Override public void onReceivedData(byte arg0) { String data = null; try { data = new String(arg0, "UTF-8"); data.concat("/n"); tvAppend(textView, data); } catch (UnsupportedEncodingException e) { e.printStackTrace(); } } };
Полученные данные будут в форме необработанных байтов. Нам придется перекодировать их в читаемый формат, например, UTF-8. Затем они добавляются в TextView с помощью специального метода tvAppend() . Это делается так потому, что любые изменения в пользовательском интерфейсе могут выполняться только в потоке пользовательского интерфейса. Так как данный Callback будет запущен, как фоновый поток, то он не может напрямую повлиять на пользовательский интерфейс.
Private void tvAppend(TextView tv, CharSequence text) { final TextView ftv = tv; final CharSequence ftext = text; runOnUiThread(new Runnable() { @Override public void run() { ftv.append(ftext); } }); }
Передача данных на устройство
Передача данных относительно проста по сравнению с чтением данных с устройства. Это простой вызов функции с байтами данных, которые необходимо передать, в качестве аргумента. Это будет реализовано в методе onClick кнопки Send .
SerialPort.write(string.getBytes());
Закрытие соединения
Чтобы закрыть соединение, просто закройте последовательный порт.
SerialPort.close();
Манифест приложения
Манифест объявляет, какие дополнительные разрешения могут потребоваться приложению. Единственное необходимое нам разрешение - это разрешение сделать телефон USB хостом. Добавьте следующую строку в манифест:
Приложение можно заставить запускаться автоматически, добавив фильтр интентов в главную активность MainActivity . Этот фильтр интентов будет срабатывать при подключении любого нового устройства. Вид устройства может быть указан явно с помощью ID поставщика (Vendor ID) и/или ID продукта (Product ID) в XML файле.
Обратите внимание на строку " android:resource="@xml/device_filter ". Она говорит компилятору, что он может найти свойства устройства в файле с именем device_filter в каталоге src/main/res/xml , поэтому создайте подкаталог " xml " в каталоге src/main/res и поместите в него файл со следующим содержанием:
Тестирование приложения
Соберите приложение и запустите его на своем смартфоне. Теперь запустите Arduino IDE и настройте Arduino для простого эхо всего, что плата будет принимать через последовательный порт. Вот очень простой код, помогающий сделать это:
Void setup() { Serial.begin(9600); } void loop() { char c; if(Serial.available()) { c = Serial.read(); Serial.print(c); } }
Теперь подключите Arduino к microUSB порту телефона, используя OTG кабель. Приложение должно запуститься автоматически. Попробуйте послать какой-нибудь текст, и те же данные будут возвращены обратно!

Заключение
Данная статья показывает, как Arduino может общаться с вашим смартфоном. И возможности использования этого бесконечны! В случае, когда необходимы данные с любого датчика, которого нет среди встроенных в смартфон, можно воспользоваться любым микроконтроллером для считывания данных с этого датчика и передачи их на смартфон. В следующей статье будет показано, как подключить смартфон к Arduino, используя популярный bluetooth модуль HC05.
В данной статье будет подробно расписано создание небольшого приложения для мобильной операционной системы Android и скетча для Arduino. На Arduino Uno будет стоять Wireless Shield с Bluetooth-модулем. Приложение будет подключаться к Bluetooth-модулю и посылать некую команду. В свою очередь скетч по этой команде будет зажигать или гасить один из подключенных к Arduino светодиодов.
Нам понадобится
Создание приложения для Android
Заготовка
Разработка для ОС Android ведется в среде разработки ADT, Android Development Tools. Которую можно скачать с портала Google для разработчиков. После скачивания и установке ADT, смело его запускаем. Однако, еще рано приступать к разработке приложения. Надо еще скачать Android SDK нужной версии. Для этого необходимо открыть Android SDK Manager «Window → Android SDK Manager». В списке необходимо выбрать нужный нам SDK, в нашем случае Android 2.3.3 (API 10). Если телефона нет, то выбирайте 2.3.3 или выше; а если есть - версию, совпадающую с версией ОС телефона. Затем нажимаем на кнопку «Install Packages», чтобы запустить процесс установки.
После завершения скачивания и установки мы начинаем создавать приложение. Выбираем «File → New → Android Application Project». Заполним содержимое окна так, как показано на рисунке.

Application Name - то имя приложения, которое будет показываться в Google Play Store. Но выкладывать приложение мы не собираемся, поэтому имя нам не особо важно.
Project Name - имя проекта в ADT.
Package Name - идентификатор приложения. Он должен быть составлен следующим образом: название Вашего сайта задом наперед, плюс какое-либо название приложения.
В выпадающих списках «Minimum Required SDK», «Target SDK», «Compile With» выбираем ту версию, которую мы скачали ранее. Более новые версии SDK поддерживают графические темы для приложений, а старые нет. Поэтому в поле «Theme» выбираем «None». Нажимаем «Next».
Снимаем галочку с «Create custom launcher icon»: в рамках данной статьи не будем заострять внимание на создании иконки приложения. Нажимаем «Next».
В появившемся окне можно выбрать вид «Activity»: вид того, что будет на экране, когда будет запущено приложение. Выбираем «Blank activity», что означает, что мы хотим начать всё с чистого листа. Нажимаем «Next».
В нашем приложении будет всего одно Activity, поэтому в появившемся окне можно ничего не менять. Поэтому просто жмем на «Finish».
Все, наше приложение создано.
Настройка эмулятора
Отладка приложений для Android производится на реальном устройстве или, если такового нет, то на эмуляторе. Сконфигурируем свой.
Для этого запустим «Window → Android Virtual Device Manager». В появившемся окне нажмем «New». Заполняем поля появившейся формы. От них зависит сколько и каких ресурсов будет предоставлять эмулятор «телефону». Выберите разумные значения и нажимайте «ОК».

В окне Android Virtual Device Manager нажимаем кнопку «Start». Это запустит эмулятор. Запуск занимает несколько минут. Так что наберитесь терпения.
В результате вы увидите окно эмулятора подобное этому:

Заполнение Activity
Activity - это то, что отображается на экране телефона после запуска приложения. На нем у нас будет две кнопки «Зажечь красный светодиод» и «Зажечь синий светодиод». Добавим их. В панели «Package Explorer» открываем res/layout/activity_main.xml . Его вид будет примерно таким же, как на скриншоте.

Перетаскиваем 2 кнопки «ToggleButton» на экранную форму. Переключаемся во вкладку «activity_main.xml» и видим следующий код:
activity_main_aiutogen.xmlЭто ни что иное, как наша Activity, которая отображается не в виде графики, а описанная в формате XML.
Сделаем имена компонентов более понятными. Изменим поля android:id следующим образом.
А еще добавим им подписи, изменим их цвет и размер текста. Результирующий код разметки будет выглядеть следующим образом.
activity_main.xmlЭти же изменения можно сделать и в графическом режиме, воспользовавшись вкладкой «Outline/Properties».

Пробный запуск
Мы можем запустить только что созданное приложение на эмуляторе. Идем в настройки запуска «Run» → Run Configurations», в левой части нажимаем на «Android Application». Появляется новая конфигурация «New_configuration». В правой части окна выбираем вкладку «Target» и выбираем опцию «Launch on all compatible devices/AVD».

Нажимаем «Apply», а затем «Run». Приложение запустится в эмуляторе.

Можно понажимать кнопки. Но ничего происходить не будет, поскольку обработчики нажатий еще нами не написаны.
Чтобы запустить приложение на реальном устройстве, необходимо включить в его настройках опцию «Отладка USB» и подключить его к компьютеру.
На реальном устройстве приложение выглядит абсолютно аналогично.

Написание кода для Android
Правка манифеста
Каждое Android-приложение должно сообщить системе о том, какие права необходимо ему предоставить. Перечисление прав идет в так называемом файле манифеста AndroidManifest.xml . В нем мы должны указать тот факт, что хотим использовать Bluetooth в своем приложении. Для этого достаточно добавить буквально пару строк:
AndroidManifest.xmlДобавляем основной код
Пришла пора вдохнуть жизнь в наше приложение. Открываем файл MainActivity.java (src → ru.amperka.arduinobtled). Изначально он содержит следующий код:
MainActivityAutogen.java package ru.amperka.arduinobtled ; import android.os.Bundle ; import android.app.Activity ; import android.view.Menu ; public class MainActivity extends Activity { @Override protected void onCreate(Bundle savedInstanceState) { super .onCreate (savedInstanceState) ; setContentView(R.layout .activity_main ) ; } @Override public boolean onCreateOptionsMenu(Menu menu) { getMenuInflater() .inflate (R.menu .main , menu) ; return true ; } }Дополним код в соответствии с тем, что нам нужно:
Будем включать Bluetooth, если он выключен.
Будем обрабатывать нажатия на кнопки
Будем посылать информацию о том, какая кнопка была нажата.
Передавать на Arduino мы будем один байт с двузначным числом. Первая цифра числа - номер пина, к которому подключен тот или иной светодиод, вторая - состояние светодиода: 1 - включен, 0 - выключен.
Число-команда, рассчитывается очень просто: Если нажата красная кнопка, то берется число 60 (для красного светодиода мы выбрали 6-й пин Arduino) и к нему прибавляется 1 или 0 в зависимости от того, должен ли сейчас гореть светодиод или нет. Для зеленой кнопки всё аналогично, только вместо 60 берется 70 (поскольку зеленый светодиод подключен к 7 пину). В итоге, в нашем случае, возможны 4 команды: 60, 61, 70, 71.
Напишем код, который реализует всё сказанное.
MainActivity.java package ru.amperka.arduinobtled ; import java.io.IOException ; import java.io.OutputStream ; import java.lang.reflect.InvocationTargetException ; import java.lang.reflect.Method ; import android.app.Activity ; import android.bluetooth.BluetoothAdapter ; import android.bluetooth.BluetoothDevice ; import android.bluetooth.BluetoothSocket ; import android.content.Intent ; import android.os.Bundle ; import android.util.Log ; import android.view.Menu ; import android.view.View ; import android.view.View.OnClickListener ; import android.widget.Toast ; import android.widget.ToggleButton ; public class MainActivity extends Activity implements View .OnClickListener { //Экземпляры классов наших кнопок ToggleButton redButton; ToggleButton greenButton; //Сокет, с помощью которого мы будем отправлять данные на Arduino BluetoothSocket clientSocket; //Эта функция запускается автоматически при запуске приложения @Override protected void onCreate(Bundle savedInstanceState) { super .onCreate (savedInstanceState) ; setContentView(R.layout .activity_main ) ; //"Соединям" вид кнопки в окне приложения с реализацией redButton = (ToggleButton) findViewById(R.id .toggleRedLed ) ; greenButton = (ToggleButton) findViewById(R.id .toggleGreenLed ) ; //Добавлем "слушатель нажатий" к кнопке redButton.setOnClickListener (this ) ; greenButton.setOnClickListener (this ) ; //Включаем bluetooth. Если он уже включен, то ничего не произойдет String enableBT = BluetoothAdapter.ACTION_REQUEST_ENABLE ; startActivityForResult(new Intent(enableBT) , 0 ) ; //Мы хотим использовать тот bluetooth-адаптер, который задается по умолчанию BluetoothAdapter bluetooth = BluetoothAdapter.getDefaultAdapter () ; //Пытаемся проделать эти действия try { //Устройство с данным адресом - наш Bluetooth Bee //Адрес опредеяется следующим образом: установите соединение //между ПК и модулем (пин: 1234), а затем посмотрите в настройках //соединения адрес модуля. Скорее всего он будет аналогичным. BluetoothDevice device = bluetooth.getRemoteDevice ("00:13:02:01:00:09" ) ; //Инициируем соединение с устройством Method m = device.getClass () .getMethod ( "createRfcommSocket" , new Class { int .class } ) ; clientSocket = (BluetoothSocket) m.invoke (device, 1 ) ; clientSocket.connect () ; //В случае появления любых ошибок, выводим в лог сообщение } catch (IOException SecurityException e) { Log.d ("BLUETOOTH" , e.getMessage () ) ; } catch (NoSuchMethodException e) { Log.d ("BLUETOOTH" , e.getMessage () ) ; } catch (IllegalArgumentException e) { Log.d ("BLUETOOTH" , e.getMessage () ) ; } catch (IllegalAccessException e) { Log.d ("BLUETOOTH" , e.getMessage () ) ; } catch (InvocationTargetException e) { Log.d ("BLUETOOTH" , e.getMessage () ) ; } //Выводим сообщение об успешном подключении Toast.makeText (getApplicationContext() , "CONNECTED" , Toast.LENGTH_LONG ) .show () ; } @Override public boolean onCreateOptionsMenu(Menu menu) { // Inflate the menu; this adds items to the action bar if it is present. getMenuInflater() .inflate (R.menu .main , menu) ; return true ; } //Как раз эта функция и будет вызываться @Override public void onClick(View v) { //Пытаемся послать данные try { //Получаем выходной поток для передачи данных OutputStream outStream = clientSocket.getOutputStream () ; int value = 0 ; //В зависимости от того, какая кнопка была нажата, //изменяем данные для посылки if (v == redButton) { value = (redButton.isChecked () ? 1 : 0 ) + 60 ; } else if (v == greenButton) { value = (greenButton.isChecked () ? 1 : 0 ) + 70 ; } //Пишем данные в выходной поток outStream.write (value) ; } catch (IOException e) { //Если есть ошибки, выводим их в лог Log.d ("BLUETOOTH" , e.getMessage (, OUTPUT) ; pinMode(7 , OUTPUT) ; } void loop() { //Если данные пришли if (Serial.available () > 0 ) { //Считываем пришедший байт byte incomingByte = Serial.read () ; //Получаем номер пина путем целочисленного деления значения принятого байта на 10 //и нужное нам действие за счет получения остатка от деления на 2: //(1 - зажечь, 0 - погасить) digitalWrite(incomingByte / 10 , incomingByte % 2 ) ; } }Особенности заливки скетча
Для связи Bluetooth-Bee с контроллером используются те же пины (0 и 1), что и для прошивки. Поэтому при программировании контроллера переключатель «SERIAL SELECT» на «Wireless Shield» должен быть установлен в положение «USB», а после прошивки его надо вернуть в положение «MICRO».
Результат

Заключение
В данной статье мы научились создавать приложения для операционной системы Android и передавать данные по Bluetooth. Теперь при нажатии на кнопку на экране телефона на базе операционной системы Android, произойдет изменение состояния светодиода на плате.
Вы можете развить мысль и сделать более дружественный интерфейс на Android, управлять с его помощью гораздо более сложными устройствами, публиковать классные приложения в Android Market и ещё много-много всего интересного!
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- ID метки;
- Детские игрушки;
- Mesh-сети.
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.

Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.
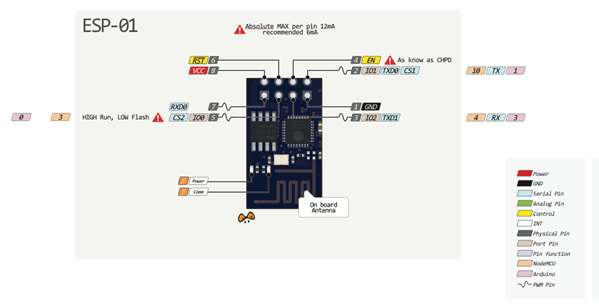

Описание контактов:
- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.
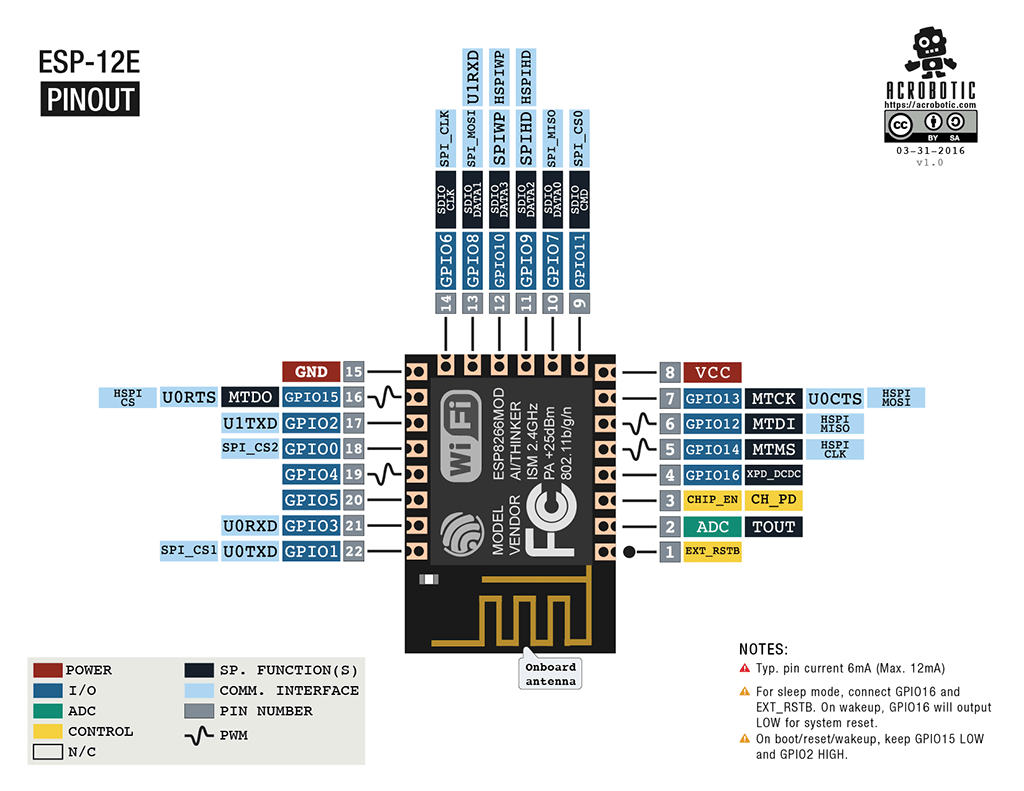
Распиновка ESP-12
Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
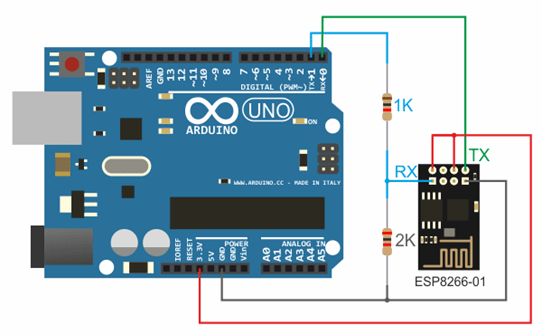
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino IDE.
- Выбрать в меню инструменты нужный порт, плату, частоту и размер flash-памяти.
- Файл - Примеры - ESP8266WiFi - WiFiWebServer.
- Записать в скетче SSID и пароль сети Wi-Fi.
- Начать компиляцию и загрузку кода.
- Дождаться окончания процесса прошивки, отсоединить GPIO0 от земли.
- Поставить скорость 115200.
- Произойдет подключение, будет записан адрес IP.
- Открыть браузер, ввести в адресной строке номер IP/gpio/1
- Посмотреть монитор порта, если к выходу GPIO2 подключен светодиод, он должен загореться.
NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.
Это небольшой рассказ о том, как построить робота в виде игрушечного автомобильчика с видео камерой, которым можно управлять с помощью компьютера или смартфона на ОС Android через WiFi. Устройство не имеет никакой автономности в смысле своего поведения (типа распознавания чего-либо), управление - только от человека, поэтому «робот» - это не совсем подходящее слово в названии.
Началось все с того, что идея управления игрушечными устройствами от первого лица (т.н. FPV) мне показалась чрезвычайно интересной с точки зрения собственно процесса. Ведь мы можем таким образом реализовать свое присутствие, не в виртуальном мире, а в реальном.
Проще и быстрее всего применить эту идею на игрушечных или модельных автомобилях. Текущие технологии должны давать такую возможность промышленности и предложить массу подобных вещей. Однако это предложение оказалось достаточно дорогим по сравнению тем что можно сделать самому.
Так как это мой первый проект, я ни программировать, ни даже паять нормально не умел, и я решил сначала поискать в интернете единомышленников и их варианты решения данной задачи.
Начав изучение вариантов, как можно осуществить эту идею, я нашел очень подробное описание подобного проекта . A его автор с радостью помог мне разобраться в проблемах, возникших при создании робота.
Так я впервые и узнал что такое …duino. Так как это был уже готовый вариант микроконтроллера, где не нужно было паять обвязку к нему, я выбрал именно его. Также очень понравилось присутствие бутлоадера, позволяющего прошивать микроконтроллер без программаторов.
Для реализации данного проекта понадобится:
- Микроконтроллер Arduino (любой: nano, uno, mega)
- Аккумулятор 9,6вольт
- Китайская машинка на радиоуправлении
- Роутер dir320 (или любой другой поддерживающий OPEN-WRT прошивку)
- Вебкамера Logitech c310 или любая другая с UVC потоком
Программ пять: на PC, на Android, на роутере (сервер управления и видеопоток), и в микропроцессоре.
Схема работы: соединяем настольный компьютер (ноутбук, далее - PC) с роутером по WiFi. На роутере при его включении автоматически загружаются 2е программы:
1) сервер. Эта программа открывает сокет (соединение) на определенном порту и ждет, когда по этому порту с ней соединится клиент (любая программа, которая обратится в этот порт и также, особым образом скажет серверу, что она готова работать через открытый сокет). Далее, после установки соединения, все что придет от клиента, будет перенаправлено по определенному пути, для нас это COM-порт, на этом порту подключен микропроцессор. И наоборот, все что придет со стороны COM-порта, будет переслано клиенту.
2) программа обработки видео, захватывает его с usb камеры и шлет на определенный порт. Для его просмотра нужно всего лишь иметь соединение с роутером на этом порту.
После того, как между компьютером и роутером установлено WiFi-соединение, запускаем на PC программу для управления роботом (тот самый клиент), эта программа соединяется с программой-сервером на роутере. Эта же или другая программа транслирует видео с WiFi роутера.
Далее, пользователь может управлять автомобильчиком и нажимает, например, кнопку «вперед». Программа на PC, отсылает команду «вперед» прямо на роутер, на его IP, но на определенный порт. На роутере, эта команда поступает в программу-сервер, т.к. выслана она на его порт, и в рамках открытого для этого сокета. Программа-сервер, ничего не делая с этой командой, просто отправляет её в COM-порт. Таким образом, команда «вперед» оказывается в микропроцессоре, который в ответ на нее, дает сигнал «вперед» на один из своих выводов. К таким выводам процессора подсоединена схема управления двигателями, т.к. сам микропроцессор управлять ими не может в силу своей маломощности.
Управлять исполнительным устройством через роутер, без микропроцессора не получится, т.к. микропроцессор может формировать сигналы «1» (напряжение >2,5v) или «0» (меньше обозначенного) на любом из десятка-другого своих выводов. У роутера же выводов нет, есть только порты ввода/вывода, типа USB или COM (serial), в которых по 2-3 провода.
Теперь часть практическая. Заранее скажу, что несмотря на кажущиеся сложности, все на самом деле просто, если речь идет о простом копировании этого проекта – ведь все уже сделано и работает. Нужно просто выполнить в точности эту инструкцию.
Изначально микроконтроллером был freeduino maxserial у которого был com port, который был одним из немногих(как я тогда считал) для подключения к uart роутеру, для этого нужно было паять переходник с uarta на com чтобы соединить его с роутером. Его брать я не очень хотел, так как оригиналом есть все-таки Arduino, да и Freeduino в Украине нет.

Как я выяснил потом, все было это просто излишнее нагромождение схемы. Обойтись можно всего 1 проводком который будет идти от TX роутера(на рисунке) к RX (0 пин) микроконтроллера.
Непонятно почему но на фридуине оказалось для нормального подключения нужно tx на tx. Скорее всего просто неверно нанесено обозначение. (тут 0 пин tx) По этому лучше брать оригинальный
.
Машинку я купил хорошую, хоть и китайскую

Машинка оказалась очень мощная, 5 кг на ровной поверхности тянула очень уверено. Также у нее в комплекте шел аккумулятор на 6 вольт. Что касается электроники, то в машинке уже есть готовый драйвер двигателей, на который можно подать управляющие слаботочные выходы с микроконтроллера (если бы с машинкой не повезло - драйвер моторов можно было взять тоже от arduino)
Роутер требует прошивку openwrt и список пакетов указанных на рисунке.

Роутер можно настроить как точку доступа, которой могут подключится любые устройства, имеющие WiFi. И, даже если не будет программного обеспечения для управлении машинкой – использовать ее как беспроводную камеру видеонаблюдения.
Камера с310 просто подключается к порту usb на роутер и не требует пайки, требует небольших настроек в роутере. Проект имеет 2 цепи питания, 1 цепь питается от 9,6 вольт - роутер и микроконтроллер, 2 цепь питается от 6 вольт - привод и рулевое машинки. Можно обойтись всего 1 источником питания в 9,6 вольт, но более емкостным. Роутер потребляет 2А, микроконтроллер потребляет почти незаметно, машинка 4А.
Программа микроконтроллера обрабатывает сообщения, которые приходят с последовательного порта роутера, обработка происходит побайтово через portb arduino, например если пришло в роутер 2, то, переведя в двоичную систему получаем 00000010 – что соответствует 2 пину на portb. Такое решение позволяет управлять одновременно несколькими пинами. Вот что получилось в итоге:

Приложение для андроид:

Приложение для пк:

Данный проект еще не закончен и продолжает совершенствоваться.
В планах использовать arduino mega, роутер mr3020, вебакамеру оставить как есть(возможно добавить сферическую линзу для большего обзора), задействовать шим для плавного и точного управления, использовать сервопривод для поворотов, добавить дальномер. Добавить видео на Android.
- полный каталог плат







")


 на iPhone и iPad")

")


 с помощью Word")





 на iPhone и iPad")

")
